无刷直流电动机的逆变器可分为两大类基本拓扑结构:电压源逆变器(VSI)和电流源逆变器(CSI)。控制器还可按所用固态开关和基于控制策略不同进一步分类。最常见和大量采用的是三相六状态六开关驱动的VSI拓扑结构,见12.11节。一般比较简单的控制器只需要换相控制和电流控制功能。
当前,在兼顾性能的前提下,尽可能地降低成本已成为BLDCM研究的另一热点问题。为了降低驱动器成本可以通过两种方法,即改变电路拓扑结构和改变控制策略。在电子驱动器成本中,固态功率开关、电感和大电解电容器是主要部分,所以电路拓扑结构方面,设法采用较少功率开关数,传感器数和相关的电路使逆变器成本最小化。
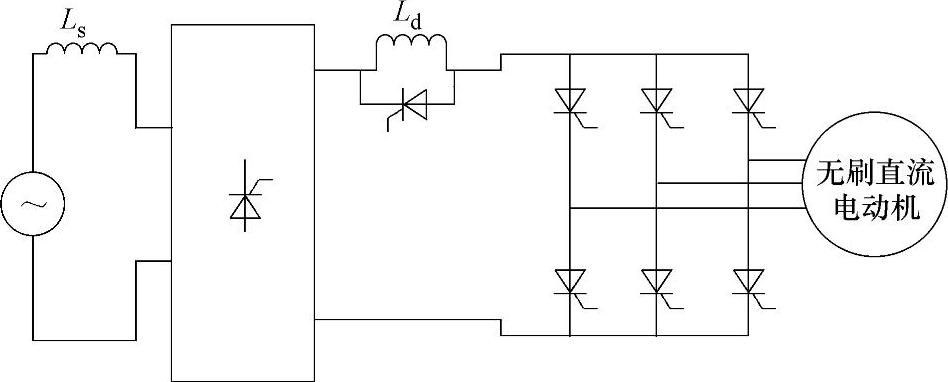
图12-17 晶闸管负载换流逆变拓扑结构
图12-17所示的拓扑结构是一个电流源逆变器(CSI)[7-9],整个主电路是根据交—直—交负载换流逆变(LCI)原理工作的,它通过单相全控晶闸管电路进行整流,逆变同样是由晶闸管组成三相全桥逆变电路。由于大部分消费产品使用单相电源,驱动器输入级使用单相晶闸管整流有助于进一步降低成本。与传统PWM控制的电压源逆变器相比LCI的无刷电机驱动控制电路更简单紧凑,损耗更低。电流型逆变器免除大电解电容和采用价格较低半控型器件晶闸管代替全控型器件IGBT,大大减小系统的成本。在这种电流调制控制系统中,只需要一个电流传感器。因为在电机工作的任意时刻都只有两个开关管导通,而且电流流过任一导通相的数值大小都与Ld的电流是相同的。电流大小是通过调节输入全控型整流器来实现的。此外,它具有电流源驱动器拓扑固有的能量再生和因直流连接电感作用具有内部过电流保护功能,它还有可以在四象限模式运行,运行速度范围宽的优点。当驱动器采用数字信号处理器,如TMS320F240为控制芯片时,只需很少外部硬件电路,使控制系统结构十分紧凑,成本更低。按图12-18系统控制框图进行模拟和实验结果表明,电机在满载下起动都没有出现任何换相失败情况,电机的动、静态运行性能较理想。然而,这种拓扑结构主要缺点是需要一个高容量的大电感Ld。
常规的六开关拓扑结构,平均每相2个开关。为了节省成本,已提出每相小于2个开关的拓扑结构,例如,一种三相四开关拓扑结构,它采用不同的PWM和滞环电流控制方法,可实现六状态运行。详见下一节分析。
经改进的带有功率因数校正功能的拓扑结构如图12-19所示,但此时已需要6个主开关。这种拓扑结构是单相—三相变流器,它的输入电流是正弦波,功率因数接近于1。由于交流输入和无刷直流电动机之间通过DC链接这种拓扑结构,功率可双向流动实现再生制动。这种拓扑结构的开关控制需要对称的脉宽调制,脉宽调制可采用数字信号处理器(DSP)或现场可编程门阵列(FPGA)生成。
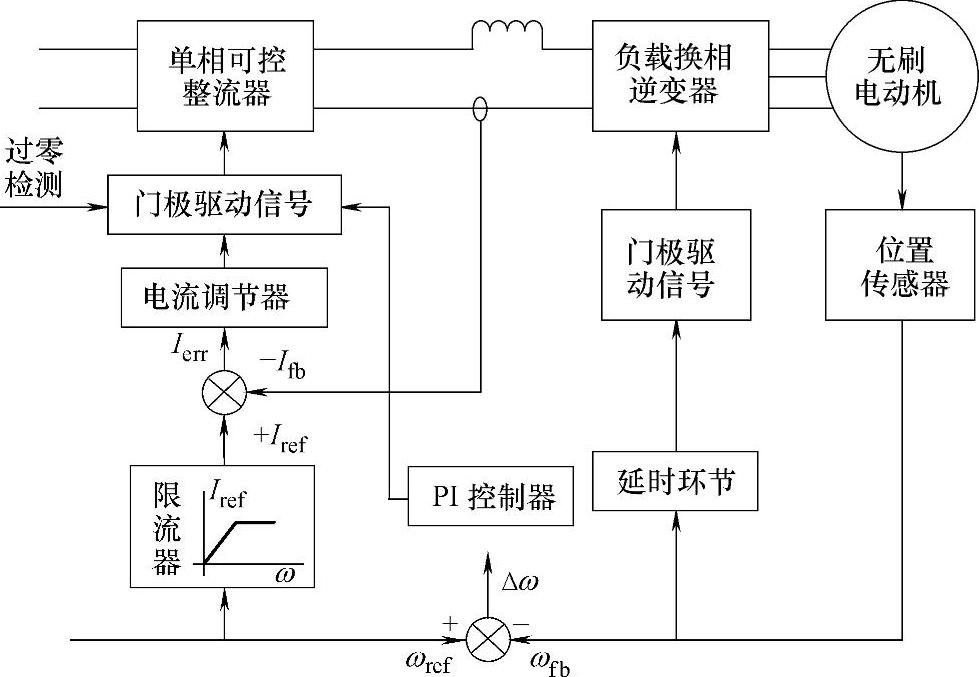
图12-18 系统控制框图
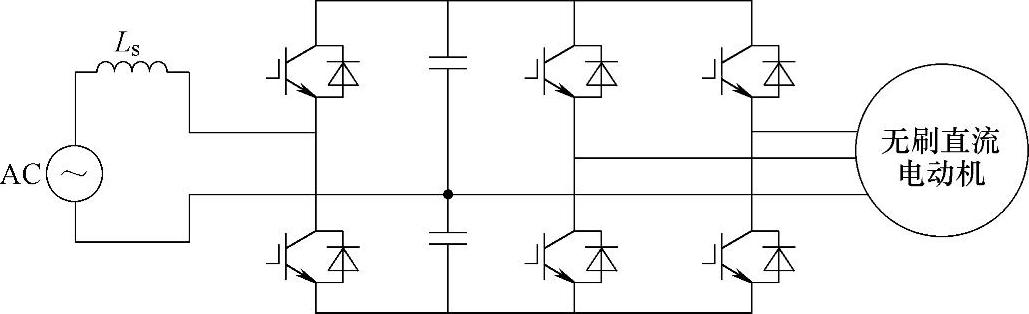
图12-19 没有输入整流器的三相四开关拓扑结构
另一类拓扑是如图12-20所示的C-dump(电容储能型)转换器拓扑结构,m相电机只需m+1个开关(和并联功率二极管)。例如三相无刷直流电动机只需四个开关(和二极管),其中有三个是连接相绕组,还有一个是与能量恢复电容器连接。由于每相只有一个开关,在它的电流只能是单向的,因此,它类似于半波驱动器。利用一个小电容回收开关截止时绕组释放的能量。为了将电容储存的能量回馈至电源,必须有一个电感元件共同作用。
传统的无刷直流电机调速系统中,变换器多采用桥式拓扑,包括半波和全波电路。半波电路比全波电路使用的功率器件数目少(每相只有一个功率开关),但电机只能在两象限运行,限制了应用场合。全波电路使用较多的功率开关(每相有两个功率开关)解决了四象限运行的问题,但它存在桥臂直通的可能性使之可靠性降低。折中这两种电路,出现了电容储能型(C-dump)变换器。由于只需使用较少的功率开关就能够实现电机的四象限运行,且不存在桥臂直通的可能性,它在可靠性和经济性上有相应的优势,因此是无刷直流电机调速系统另一个较好的选择。
文献[10]对采用C-dump拓扑结构变换器的无刷直流电机调速系统进行了系统的研究。分析了正转、反转及电动、制动运行的原理和控制逻辑。实验结果表明,该系统可以方便地四象限运行并具有良好的运行性能。无刷直流电机调速系统中C-dump变换器斩波开关可采取三种控制方法:滞环控制、PWM控制以及滞环结合PWM控制。这些控制方式对变换器储能电容电压和电机电流有不同影响。研究表明,C-dump变换器的斩波开关采用滞环控制与PWM控制相结合的方式工作能较好地减小电机电流脉动,进而减小电磁转矩波动,有利于系统稳态性能的提高。(https://www.daowen.com)
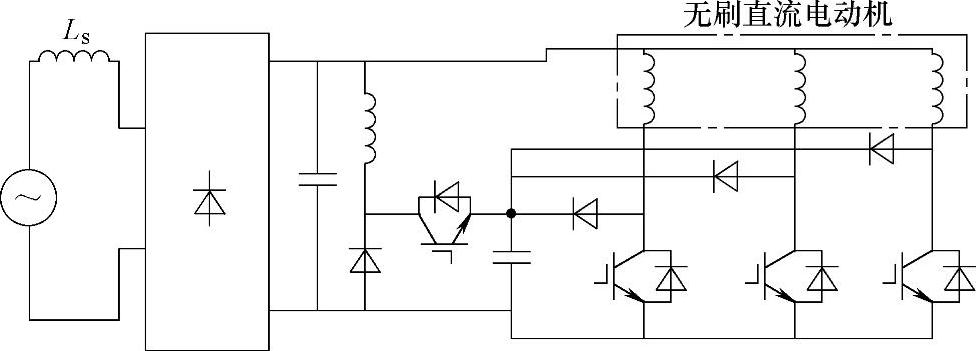
图12-20 C-dump拓扑
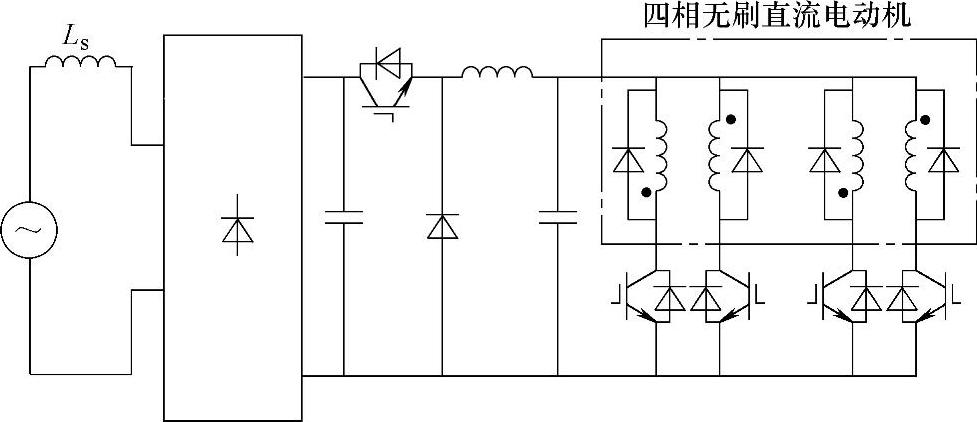
图12-21 buck变换器两相裂相绕组拓扑结构
图12-21所示采用buck降压型DC/DC变换器驱动裂相绕组的两相电机拓扑结构,适用于较低电压的应用。另一个是将buck降压变换器与C-dump变换器优点结合的拓扑结构用于无刷电机控制。这种拓扑结构又称为可变直流转换器拓扑结构(见图12-22),有可变直流电压,四象限运行和低开关数等优点。还有一些拓扑结构提供功率因数校正(PFC)用于无刷直流电动机控制。
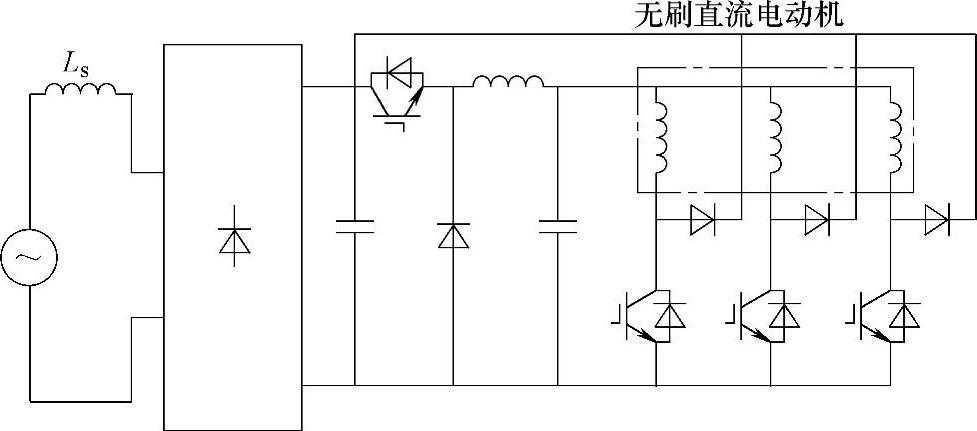
图12-22 可变直流转换器拓扑结构
以SEPIC变换器为基础的单极性控制拓扑结构(见图12-23),这些拓扑结构也是无刷直流电动机的低成本控制器。
当然,相对于传统的双极性驱动电路,上述无刷直流电动机单极性控制拓扑结构只需较少电子元件和使用简单的电路。从而达到成本最低化,适用于对成本比控制精度更看重的应用场合。
在调速控制系统,采用PWM调压的常规六开关三相逆变器的拓扑结构,当转速需要向低速区扩展时,往往因占空比很低,电流不连续引起转矩波动。如果采用buck降压型DC/DC变换器与常规六开关三相逆变器连接的拓扑结构,以DC/DC变换器PWM调压代替三相逆变器PWM,使电机绕组电流在低速区保持连续,电流波动和转矩波动改善,运行平稳。而且逆变器和电机的损耗和温升将减低。
无刷直流电动机定子绕组换相必须与转子即时位置同步,因此,控制器必须得到有关转子的位置信息。这就需要安装专门的转子位置传感器机构,它增大了电机尺寸和增加了成本,而且额外的元件和布线使系统可靠性降低。而且,在某些应用中电机安装位置传感器是不适宜的。因此,出现了多种无位置传感器的控制方案,转子位置信息从电机绕组的电压和电流推断获得。无位置传感器的控制也有助于总体成本的降低,详见第13章。
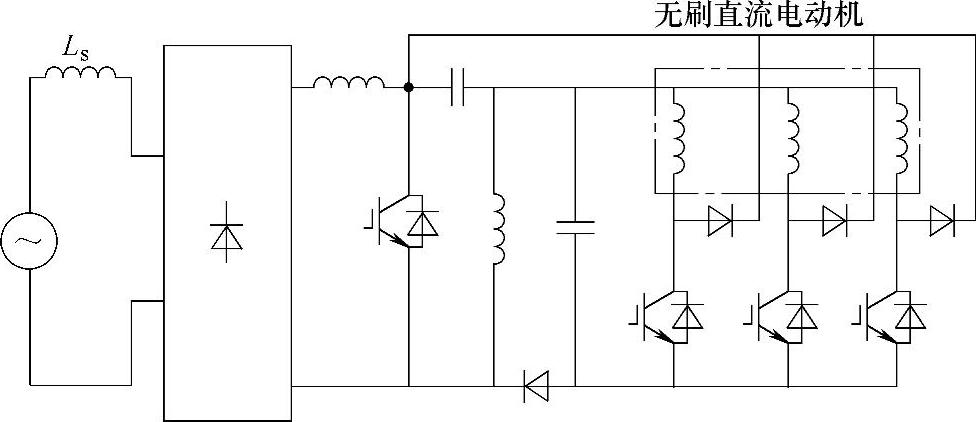
图12-23 SEPIC变换器单极性控制拓扑结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





