对无刷直流电动机的控制通常是采用电压调节进行。可归纳为如下几种方法:
1)如果系统是交流供电需要整流电路获得直流母线电压,采用以晶闸管构成可控整流桥,利用调相方法也可调节直流母线电压Ubus的大小,如图12-11所示。这种控制方法适用于对动态性能要求不高的场合。
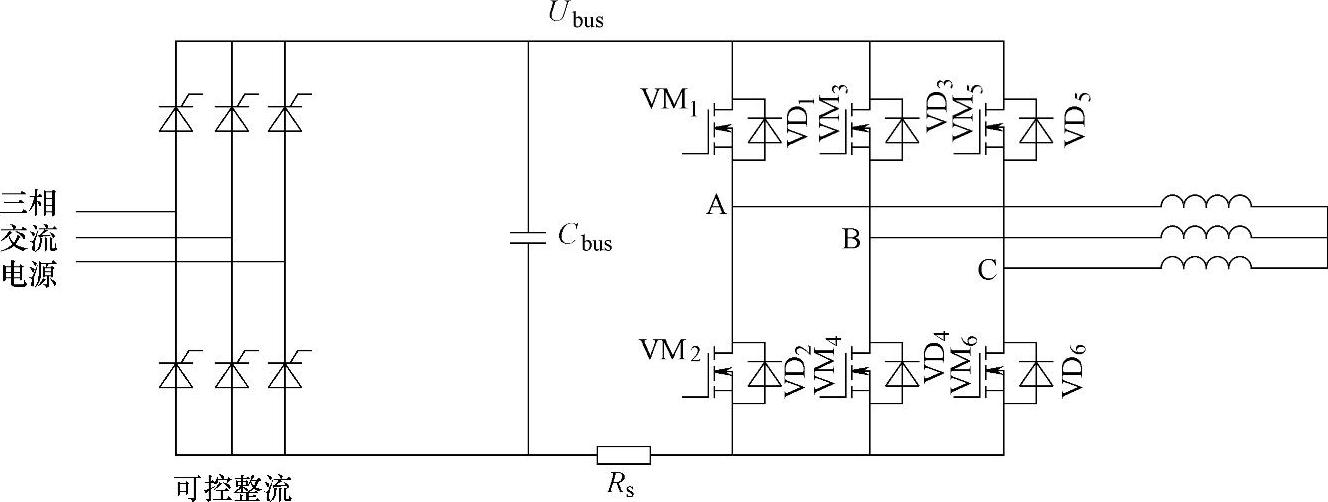
图12-11 可控整流电路和三相逆变桥主电路
2)如果已是直流电源,最简单的例子是在控制器连接的直流母线上串接一个功率晶体管,用以调节给控制器的直流电压。此功率晶体管可以工作在放大器状态,给控制器的电压可以连续变化。这种控制方式电路比较简单而且有大的带宽。但是在功率晶体管上的损耗大,系统总效率低,只适用于小功率系统。可参见参考文献[1]的TDA5145应用电路一例。
3)另外一种常见方式就是采用脉宽调制(PWM)技术。此时上述串接的功率晶体管工作在开关状态,改变PWM控制占空比等效于改变平均电压调节电动机。在串接的功率晶体管后面可加上一个滤波环节以减少给控制器电压的波动。参见参考文献[1]的TDA5146T应用电路例。
4)实际上,最常见的方法是以脉宽调制直接控制功率桥的开关管。脉宽调制控制常用于速度调节,它以功率开关的占空比变化相当于外施加电压的变化控制电机的转速。它也可用于对绕组电流的控制,实现软起动、限流、特定电流波形等控制。由于无刷直流电动机通常有较高的电感,合适调制频率下电机电流接近于连续,波动较小。调制频率通常在1~30kHz之间选择。
在无刷直流电动机的转矩-转速图有四个象限,脉宽调制控制常见两种方式:两象限方式和四象限方式。两象限方式电机局限于在1和3象限工作,转矩和转速可同为正或同为负,电机可正转和反转运行,但没有制动能力。两象限方式的PWM信号只控制逆变桥的一半桥臂,故称为半桥调制。例如,PWM信号只控制下桥臂开关,当下桥臂开关截止时,续流流过上桥臂的开关管和二极管。参见图12-11的主电路,以A/B相导通状态为例,PWM信号控制开关VM4,在PWM-ON期间,导通电流流过VM1—A绕组—B绕组—VM4。在PWM-OFF期间,VM4截止,续流电流流过VM1—A绕组—B绕组—VD3闭合。半桥调制方式也可以是PWM信号只控制逆变桥的上桥臂。
而四象限工作方式,也能够在2和4象限工作,此时转矩和转速方向相反,产生制动作用。四象限方式的PWM信号同时控制逆变桥的上桥臂和下桥臂开关,所以四象限方式又称为全桥调制方式。续流流过上下桥臂的二极管,它的电流衰减过程要快得多。还是以A/B相导通状态为例,PWM信号控制开关VM1和VM4,在PWM-ON期间,导通电流也是流过VM1—A绕组—B绕组—VM4。但是在PWM-OFF期间,VM1和VM4都截止,续流的路径变为VD2—A绕组—B绕组—VD3。这种状况就好像一个反向总线电压施加在A和B相绕组上所以电流很快衰减。四象限方式的电流控制较好,适于于对快速性要求高的伺服控制系统。由于快速衰减电流要流过总线电容Cbus,应该选择具有更高电容值和高纹波电流等级的电容器。上桥臂和下桥臂开关同时PWM,为了避免上下桥臂开关直通短路,必须在开关时间上设置一个死区时间,通常为若干微秒。两象限方式则不必设置死区时间。
四象限方式有更高的PWM开关损耗。相对来说,两象限方式有较高效率和较安全。
参考文献[6]分析和比较了不同PWM调制方式下无刷直流电机电磁转矩,推导了无刷电机在单管PWM(半桥调制)和双管PWM(全桥调制)下稳态运行时的相电流和电磁转矩计算公式。单管PWM调制包括PWM_ON、ON_PWM、Hpwm_Lon、Hon_Lpwm四种方式,在忽略绕组电阻条件下,一个PWM周期内平均电流值为(https://www.daowen.com)

式中,ud为电源电压;ia1为单管PWM调制稳态时的相电流最小值;T为PWM调制周期;D为PWM的占空比。双管PWM调制下稳态运行时一个PWM周期内平均电流值为

ia2为双管PWM调制稳态时的相电流最小值。分析认为,ia1>ia2,比较上述公式得到:Ia1>Ia2。
由于电磁转矩与电流有正比关系,得到分析结论是:在同一台电机同一个占空比D下,单管PWM调制比双管PWM调制下的电流和电磁转矩大。通过一个180W 8极电机实际试验证实上述分析正确。而且,在D=0.6时,单管PWM调制的稳态转速2000r/min,而双管PWM调制稳态转速仅约为1500r/min。
在无刷直流电动机调节直流母线电压时,不同电压下的机械特性呈现一组近似平行较硬特性。但采用脉宽调制控制时,由于电流较小的时候,在PWM-OFF期间电流较快衰减到零,但此时PWM-OFF还没有结束,电流表现为不连续。当电流增加到某一个值后电流才能够连续。这样,不同占空比D的机械特性和调节直流母线电压时的机械特性稍有不同,如图12-12所示,机械特性分为两个区域:连续区和断续区。连续区特性呈现一组近似平行较硬的特性,断续区特性随着电流减小向上翘起,呈现一组较软的特性。不同占空比D的电流断续和连续交接点也不同。不难理解,占空比D越小,断续和连续交接点的电流越大。此外,交接点的电流值还和电机电感和PWM调制频率大小有关。电感越大和PWM调制频率越高交接点的电流越小。[4]
PWM调制方式对电机换相转矩波动的影响见第9章9.4节。
5)采用DC/DC变换器技术是另外一种调压方法。例如在电源和逆变桥之间插入buck等直流调压器。参见12.10节有关部分。buck降压变换器主电路由一个功率开关管、功率二极管、电感和电容组成,参见图12-21。它采用PWM控制方式按照要求的电机转速和负载变化调节PWM占空比,将固定的直流电压变换为可控直流电压,供给逆变桥,实现对电机的调节。通过电感和电容构成低通滤波器来获得平直的输出直流电压和电流。这样,逆变器和电机不必工作于PWM方式,降低它们的损耗和发热(PWM损耗和发热转移到DC/DC变换器上)。它还特别适用于采用反电动势过零法无传感器控制,可避免电机PWM脉冲对反电动势信号采样的干扰,降低因滤波器相移带来的不良影响,使无传感器控制可靠运行。参见第13章13.1节。
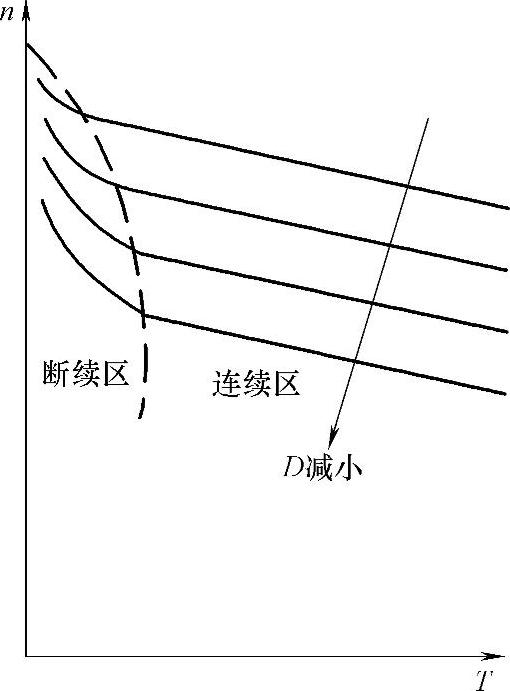
图12-12 不同占空比D的机械特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





