采用永磁交流伺服电动机的伺服系统,按其电流环中电流驱动的不同,区分为矩形波电流驱动和正弦波电流驱动两种模式。随之其伺服系统的电流环和速度环的结构有较大差异。在模拟控制或数字—模拟控制的系统中,矩形波驱动系统的速度环多采用无刷直流测速发电机作为速度反馈元件,而正弦波驱动系统较多采用旋转变压器(resolver)作绝对位置传感器、电流换相控制和速度反馈元件。旋转变压器输出正余弦信号在RDC(旋转变压器—数字转换器)专用集成电路中转换,为伺服系统位置环、速度环和电流环三环控制提供所必需的信号,其中的速度反馈信号是正比于转速的电压信号。当然,还有一些系统是用增量式光学编码器作反馈元件,常使用F/V转换器,获得模拟量的转速信号。无论是RDC还是F/V转换器,轴速度都首先被量化为数字信息,然后经专门电路进行D/A转换才得到模拟量速度电压信号,因此在甚低速时,其不连续性就会显露出来。
实践表明,对于高调速比达1000∶1以上要求的伺服系统和调速系统,以无刷直流测速发电机作速度反馈元件是—个比较理想的方案。
这里介绍的无刷直流测速机是一种电机与电子电路结合的一体化元件。其电机部分包括一台多相永磁同步发电机和一个转子位置传感器,它们机械上是同轴安装的。多相同步发电机的定子与普通交流电机相似,安放有对称多相绕组,通常是星形接法。永磁转子在气隙中产生多极幅向磁场。与一般多相交流同步发电机不同的地方是由转子结构及绕组设计的特殊考虑,使电机旋转时各相绕组的感应电动势波形呈理想的平顶梯形波,而不是正弦波。而且,其平顶部分要有足够的宽度和尽可能小的纹波。
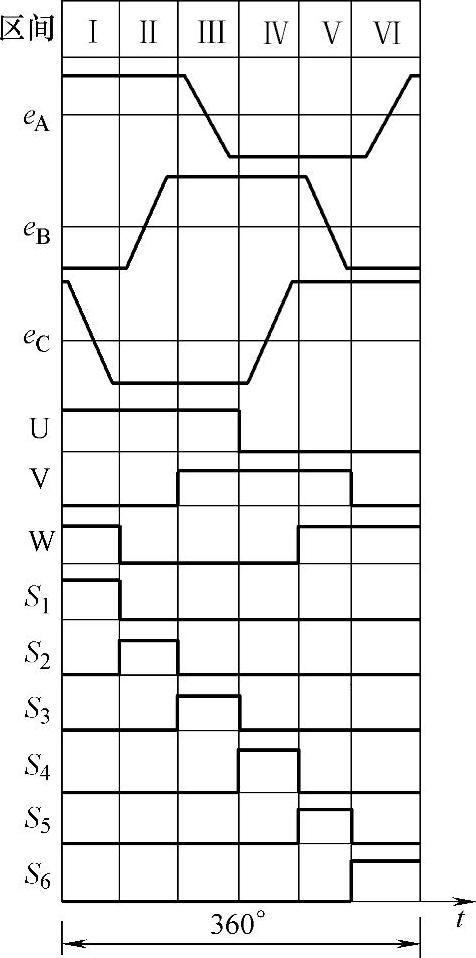
下面以三相测速发电机为例说明其工作原理。图12-9表示正转时有关信号的波形图。其中三相绕组反电动势波形eA、eB、eC为梯形波,它们的幅值分别为EA、EB、EC,相互相移为120°(电角度),且平顶部分宽度应大于120°。转子位置传感器可以使用光电,或磁编码器(绝对型),或霍尔传感器等不同工作原理的角位置传感器构成。如图12-9的U、V、W表示三路转子位置传感器信号经电路处理后得到的逻辑信号。它们各自的高电平状态为180°,相互相移为120°。由组合逻辑设计不难得到S1、S2、S3、S4、S5、S6六个采样信号,它们分别识别出图中的Ⅰ、Ⅱ、…、Ⅵ的六个时间间隔。换句话说,转子位置传感器作用是将一个周期360°区分出六个区间,在此六个区间内,采样信号对反电动势信号进行六次采样。
图12-10给出这种无刷直流测速机电原理图。在每个周期内,依次控制两个八选一的电子模拟开关(CD4051)对三相反电动势波形进行采样得到:+EA、+EA、+EB、+EB、+EC、+EC。这些信号送至运算放大器。设计上考虑到相绕组的平衡和减少信号纹波分量等因素,同时还依下顺序采样:-EB、-EC、-EC、-EA、-EA、-EB,并且乘以-1后再与上面采样信号叠加。这样利用两个低温漂运放OP07得到六个区间总采样叠加信号为:EA+EB,EA+EC,EB+EC,EB+EA,EC+EA,EC+EB。这些采样信号在运放输出端变换为一正比于转速的直流信号。而且输出电压以正负极性反映被测电机的转向。
此测速机指标:线性度为1%;正反转不对称度为1%;纹波系数(峰值—峰值)为3%,(有效值)1%。
 (https://www.daowen.com)
(https://www.daowen.com)
图12-96 个区间信号波形图
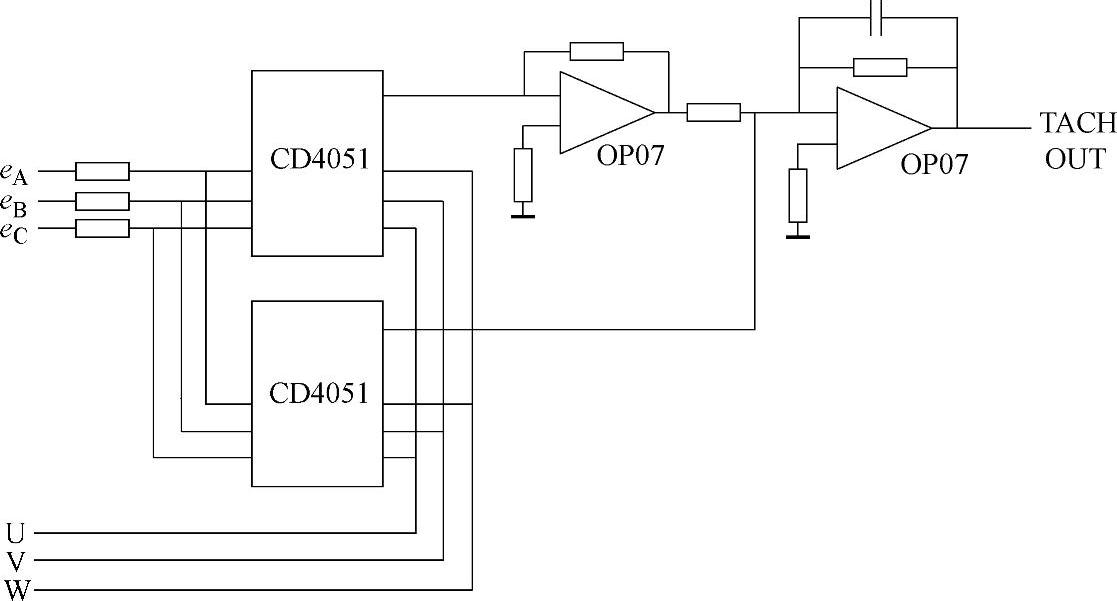
图12-10 无刷直流测速机电原理图
这种无刷直流测速机和有刷直流测速机相比,除了消除由电刷带来的诸多问题之外,还有明显优点是在零速附近不存在有刷电机的不灵敏区问题。
一些交流调速系统采用多相永磁同步测速机,它经桥式整流电路并滤波后得到直流测速信号。这种方案有三个缺点:在较低转速时,整流二极管的压降,使输出特性出现非线性,甚低速时也出现不灵敏区;不能反映转向的变化;滤波环节引起的信号滞后。而无利直流测速发电机不存在这些问题,更适用于各种交流调速系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



