无刷直流电动机构成的控制系统可分为开环控制系统和闭环控制系统。
开环控制系统是最简单的控制系统,只有转子位置传感器提供转子位置反馈信息,使电动机换相总是与转子位置同步。电动机的转速和电流由电动机的机械特性和所驱动负载的机械特性共同决定。如果电压或负载有变动,电动机的转速也会随之变化,不能控制。
常见的转速电流双闭环控制系统可以获得更好的控制性能,可以实现一定范围内的速度调节或定速稳速控制。其原理框图如图12-2所示。它需要有转速反馈和电流反馈信息,所以通常需要设置转速传感器和电流传感器。该系统的工作原理:首先,速度给定值un*与速度反馈值un进行比较,得到的速度差值,经速度调节器进行PI(比例和积分)调节,输出作为电流环的给定值ui*,与电流反馈值ui进行比较之后,电流差值再经电流调节器进行必要的放大和校正,调节后的信号在PWM电路变换成相应的经PWM的脉冲宽度,然后综合转子位置信号产生所需的各相PWM控制信号。该PWM控制信号送至基极(或栅极、门极)驱动电路,驱动三相逆变桥电路,使相应的功率开关器件工作,通过合适的PWM占空比去驱动电动机绕组。此外,该系统还利用转子位置反馈信息将电流传感器信号进行采样,形成一个代表电动机转矩的合成电流信号ui,并使相反电动势和相电流的相位始终保持一致;另外通过对霍尔位置传感器输出的信号进行处理,得到速度反馈信号un。系统常具有对过电压、欠电压、过电流、过热、超速、和I2t(绕组过热)等异常状态的保护。速度指令常为0~10V模拟电压,对应于0速到全速。新的系统也有采用数字信号作速度指令的。双闭环控制系统使电动机在电压、负载变化或外界扰动情况下,系统自动调整,使其转速能够跟踪重现速度指令的要求。(www.daowen.com)
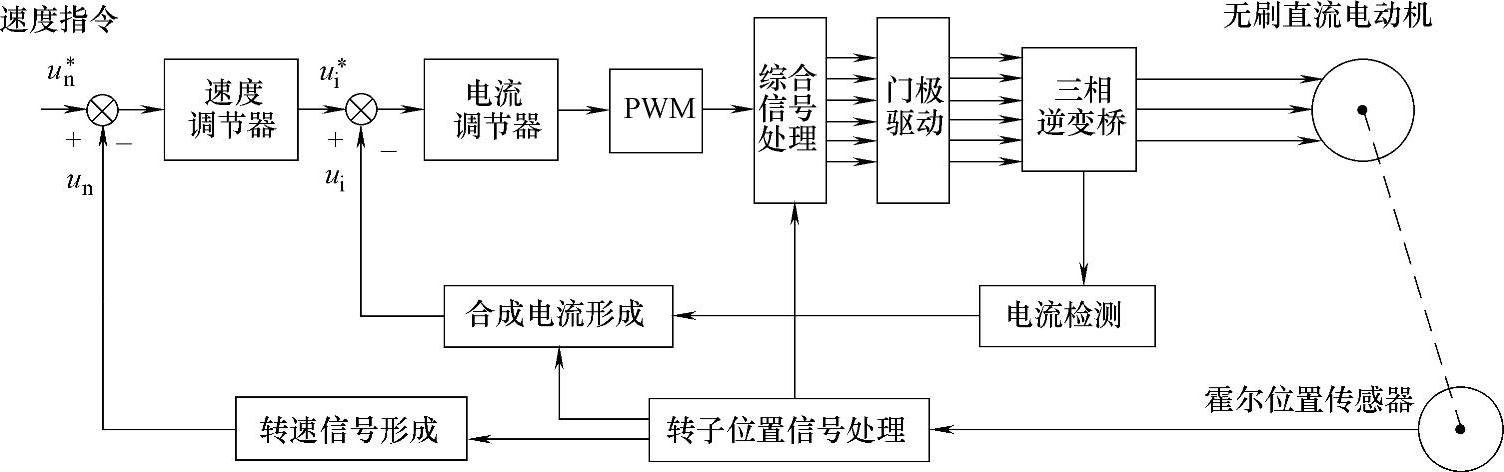
图12-2 无刷直流电动机转速电流双闭环控制系统原理框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






