在本书第2章指出,从工作原理看正弦波驱动是一种高性能的控制方式,电流是连续的,三相正弦波交流电流与三相绕组中的三相正弦波反电动势共同作用产生光滑平稳的电磁转矩。理论上可获得与转角无关的均匀输出转矩,良好设计的系统可做到3%以下的低纹波转矩。而方波驱动定子磁场是非连续、步进式旋转,从电磁转矩产生原理就决定了无刷直流电动机转矩波动比正弦波驱动要大许多。尽管在反电动势为梯形波,平顶宽度120°电角度,定子电流为方波的理想情况下,不考虑换相过程时,产生的电磁转矩将为恒值,理论上没有转矩波动。但在实际电机,由于设计和制造方面的原因,很难做到反电动势为平顶宽度120°电角度的梯形波;实际上,如在6.4.1节分析那样,大多数无刷直流电机的反电动势波形都不可能是梯形波,而更接近于正弦波;这样,如12.9节分析那样,电流波形也就必然偏离方波,这些非理想情况都会导致其电磁转矩存在原理性波动。
下面分析反电动势波形为正弦波时,在不考虑电感作用和换相过程情况下三相六状态无刷电机的转矩波动。在一个状态角θz=60°内,设两相绕组合成反电动势为
e=Ecosθ
θ2=-θ1=θz/2=30°,一相电阻为R,转速比Ku=E/U。
电压方程式 U=Ecosθ+2Ri
瞬态电流 
瞬态电磁转矩

式中,TS是堵转转矩幅值。取标幺值:
计算几个不同转速时的转矩波动示于图9-1中。图中显示出Ku=0,0.2,0.5,0.8,0.9的原理性电磁转矩随转角波动变化情况。
显然,T30和T0是转矩特异点。T30和T0分别是θ=30°和0°的电磁转矩标幺值。转矩波动Tbd按下式定义计算:

由上式计算得:当Ku=0,Tbd=15.4%;当Ku=0.8,Tbd=-24.8%;当Ku=0.9,Tbd=-47.6%。
不同转速的转矩波动Tbd计算结果示于图9-2。由图可见,在高速区,正弦波反电动势无刷直流电机的转矩波动十分严重。通常有文献说方波驱动无刷直流电机的转矩波动为15%,如上计算,是指堵转时(Ku=0)的情况。在中速Ku=0.5附近,转矩波动最低,Tbd=1.8%。
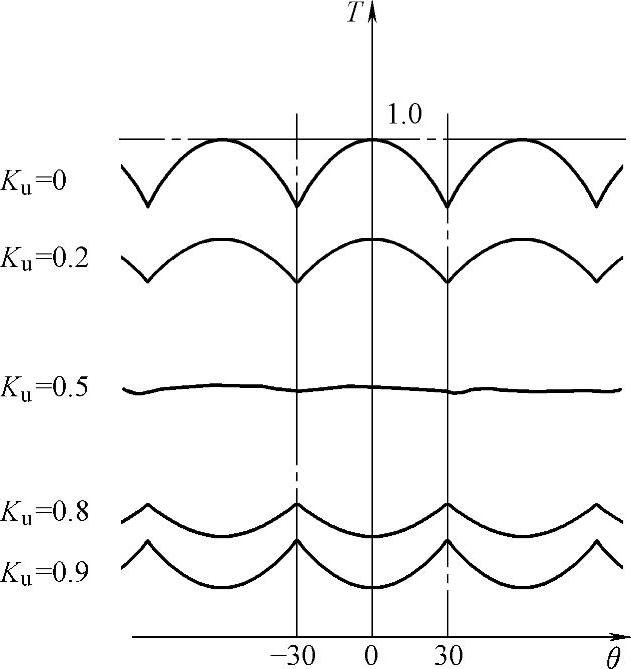
图9-1 不同转速下的原理性电磁转矩波动(www.daowen.com)
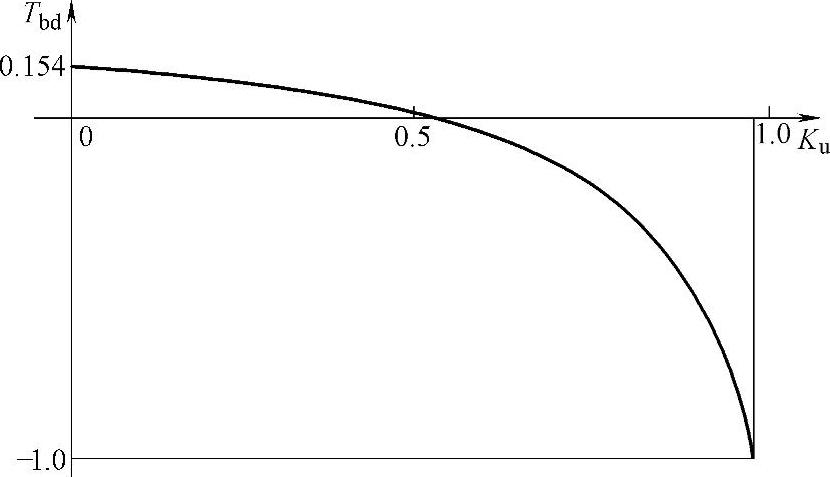
图9-2 正弦波反电动势下的转矩波动Tbd与转速比关系
这种原理性转矩波动与电机的反电动势波形和电流波形有着直接关系。抑制电磁转矩原理性转矩波动的途径包括改进电机设计和采取合适控制策略两个方面。
(1)优化电机设计法。
无刷直流电动机的磁极形状、极弧宽度、极弧边缘形状对输出电磁转矩都有很大的影响。通过选择合理的电机磁极形状或极弧宽度,以及定子绕组的优化设计,使反电动势波形尽可能接近理想波形,来降低电磁转矩波动。例如,对表面粘贴式磁钢结构的电机。常采用径向充磁而使气隙磁通密度更接近方波。又如,为了增加无刷直流电机反电动势的平顶宽度,可采用整距集中绕组(q=1)等方法。
通过电机优化设计可以适当降低电磁转矩波动,但由于电机绕组的电感存在,即使电机采用恒流源供电,在换流过程中电流不能突变,流入定子绕组的电流波形还不可能是方波。另外,对于实际电机,气隙磁场很难保持理想的方波分布,绕组感应电动势波形更难以达到理想的梯形波,这样就无法实现完全从电机设计上消除电磁转矩波动。因此,只能通过控制手段来抑制转矩波动。
(2)最佳电流法。
一种解决方法就是采用控制方法寻找最佳的定子电流波形来消除转矩波动。同时,这种最佳电流法也能消除齿槽转矩波动。但是,最佳电流法需要对反电动势进行精确测定,而反电动势的实时检测比较困难。目前较多采用的方法是对反电动势离线测量,然后计算出最优电流进行控制。因为事先需要离线测量,所以其可行性就大大降低。
(3)最佳开通角法。
采用最佳开通角的方法抑制电磁转矩波动,即先推导出转矩波动与开通角之间的函数关系式,再求取电流最优开通角,使电流波形和感应电动势波形的配合适当,从而达到削弱转矩波动的目的。
(4)谐波消去法。
谐波消去法是通过控制电流的谐波成分来消除转矩波动的方法。无刷直流电动机系统中电流或反电动势含有谐波成分时,根据测得的或计算得的各次转矩谐波成分,即可求解出最佳电流波形的各次谐波,继而得到最佳电流波形,以此作为相电流参考信号,以消除反电动势谐波产生的转矩波动。根据电磁转矩波动是由相电流和反电动势相互作用的原理,适当选取电流谐波成分(5次、7次),消除了六次、十二次谐波转矩(谐波转矩中主要部分)。仿真和实验结果表明,谐波消去法的作用是有限的,只可以把转矩波动消除到某一程度。确定最佳谐波电流的难度是很大的,这也使得谐波消去法的应用受到了限制。
(5)转矩反馈法。
谐波消去法是一种开环控制方法,当存在绕组阻抗不对称和所测电流有误差等干扰时,控制精度将会受到影响。为了克服开环控制方法的缺点,人们提出了从反馈角度考虑抑制转矩波动的方法,即以转矩为控制对象,进行闭环控制。转矩反馈法的基本原理是根据位置和电流信号通过转矩观测器得到转矩反馈信号,再通过转矩控制器控制无刷直流电动机的主电路,实现对转矩的实时控制,从而消除转矩波动。但是,转矩反馈法结构较为繁杂,需预先确定电机参数,且算法复杂,实现起来比较困难。
(6)简易正弦波电流驱动。
无刷直流电机的反电动势波形一般为梯形波,但在实际应用中,为了消除齿槽转矩,常采用斜槽、分数槽、合理设计磁极形状和充磁方向等措施,这些措施往往使得电机的反电动势波形更接近正弦波。对于这类电机,采用正弦波电流驱动比采用120°导通型三相六状态方波驱动更有利于减小转矩脉动。但是传统的正弦波驱动的电流控制方法,不仅控制算法复杂,而且大都需要高分辨率的位置传感器,这就导致体积和成本都大大增加,在一些特殊的场合无法使用。参考文献[7]就针对反电动势波形接近正弦的无刷直流电机,提出一种基于六个离散位置信号的自同步SVPWM控制方法。实验结果表明,此方法与传统的120°导通控制方式相比,可以在不损失平均电磁转矩的条件下,有效地抑制电磁转矩波动,详见第14章。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






