下面是一个45槽48极五相无刷电机绕组连接和霍尔位置传感器安放位置分析的例子。
在第3章3.5节分析结论,与传统的三相(导通角120°)相比较,五相(导通角144°)是一种较有利的选择,它的峰值转矩和平均转矩都增加而转矩波动明显降低。在3.1.4节给出了五相星形绕组电机连接与导通方式。所以,这里采用导通角144°,即每个周期有十个状态,每个状态总是有4相绕组导通的工作方式。
绕组连接和霍尔片位置排列不是唯一的,而且和控制器的真值表密切相关。在表5-21给出正转时的真值表。这里A,B,C,D,E是五相绕组名。而且,上下桥臂开关分别用Ta,Tb…和Ba、Bb…命名,它们分别连接到A,B…相绕组。即A相绕组接Ta和Ba,B相绕组接Tb和Bb…。真值表中桥臂开关的1表示导通,0表示关闭。上下桥臂开关与霍尔传感器信号的时序关系这样的安排和三相电机惯用的真值表相一致。
表5-21 五相电机四四通电真值表(正转)

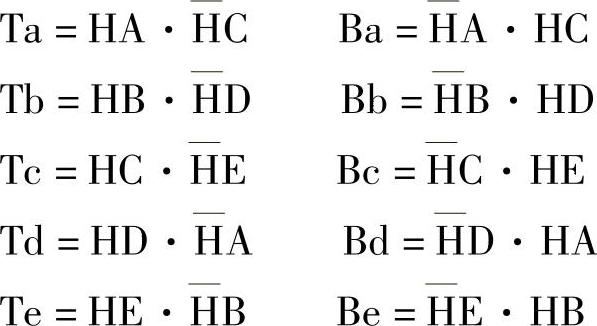
由真值表,可得到上下桥臂开关与霍尔传感器信号的逻辑关系:
五相电机的槽数必须选择为5的倍数。这里选择Z=45,由表5-20选择极数。45/44和45/46组合属于基本组合,有大的绕组系数。但是由于有不平衡径向磁拉力问题,不宜选用。因此选择旁边的45/48组合。它的基本组合:(https://www.daowen.com)
Z0/2p0=45/48=15/16
45/48组合不是基本组合,它是由3个15/16基本组合组成。图5-21是它的基本组合的电动势星形图和A相绕组部分展开图。图中序号是齿号。
利用电动势星形图,得到每相绕组连接图和霍尔传感器放置位置。例如,A相绕组的由9个齿上线圈连接:-1,2,-3,-16,17,-18,-31,32,-33。图5-21给出45/48组合的电动势星形图和A相绕组部分展开图。
仿照第7章7.5.2节对霍尔传感器位置与三相磁动势轴线对应关系分析,五相电机在四四导通方式时,A相的换相点(A相开始正向导通)应当在A相反电动势过零点后18°时刻。而A相反电动势过零点时刻,对应于磁极N前沿在落后于FA轴线90°处。所以霍尔电路HA的正确位置应在落后于FA轴线90°+18°=108°处。显然,此处正是-FE轴线处。参见图5-21。这样,得到霍尔电路位置和五相磁动势轴线对应关系,有十个霍尔电路特殊位置,分为两组,见表5-22所示。
表5-22 霍尔电路位置和五相磁动势轴线对应关系

由上述分析方法,可以得到45/48组合的霍尔传感器放置位置如图5-21所示。它们分别对正2,5,8,11,14号齿的中线。读者也可以分析得到对正槽中线的另一个放置方案。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






