其次,我们以非桥式m相无刷直流电动机为例,讨论增大每相绕组导通角来提高绕组利用率的问题。
在单向通电的非桥式换相电路中,它具有换相开关少、电路简单、成本低以及可靠性高的特点,这种换相方式(例如m=3或4)特别是在小功率无刷直流电机中得到应用。如果每相绕组依平均导通角2π/m(电角度,下同)工作,在任一时刻,仅有一相在工作,绕组利用率只有1/m。人们自然从直观出发,提高每相导通角,这样在任一时间,都会有多于一相以上的绕组在工作,它的绕组利用率提高了[3-5]。这种增大导通角以提高绕组利用率想法,是否果真能提高电机的出力和效率呢?让我们进一步分析,下面利用简化模型等效电路,讨论每相导通角变化对机械特性的影响,然后分析应用到三相和四相绕组两种常用情况。
在m相非桥式换相电路运行时,每相绕组依次通电工作,为了避免死点和负转矩的产生,每相绕组的导通角α应满足下面的条件:
允许的最小导通角αmin=2π/m。
对于任意一相绕组,在该相导通角区间内,仿照4.1节简化模型的分析方法,设它的等效电路是等效反电动势E和等效电阻R的串联,反电动势系数为K。再设反电动势波形函数为f(α)=cosα,状态角为α。考虑到m相绕组的共同作用,可以得到平均电流Iav和平均转矩Tav为
在Ω=0时,计算堵转状态下的堵转电磁转矩Ts为
在理想空载点,Tav=0,由Tav表达式,得到空载转速Ω0为
由Iav表达式,可得理想空载时的平均电流不为零,它的值是

我们用粘性阻尼系数D来表征电机机械特性的硬度,有
为对比方便起见,取标幺值表示。对于Ω0和D取α=αmin时的值为基值,分别以Ω0b和Db表示。而理想空载时的平均电流取Is为基值。这样它们的标幺值表示为

至此,我们得到m相无刷直流电机的几个有关的公式。下面,考察一下在三相和四相无刷直流电动机,其导通角在规定的范围内变化时,它的Ω0、Iav0和D的变化情况。
对于三相电机,以m=3、αmin=2π/3代入上面有关各式,得到α=2π/3~π的计算结果,见表3-25。
表3-25 半桥式三相无刷直流电动机不同导通角的性能的变化
 (https://www.daowen.com)
(https://www.daowen.com)
由表3-25可以清楚地看出,对于三相无刷直流电动机,随着导通角α从120°增大到180°,空载转速Ω0和阻尼系数D只稍有增加,但是理想空载时的平均电流却大大增加了。增大的倍数是0.284/0.032=8.84倍。在180°时理想空载平均电流竟达到一相堵转电流的0.284倍。从而使电机的效率大大下降了。
图3-10是某三相绕组无刷直流电动机,导通角α分别为120°、135°和180°时实测的机械特性曲线,图中给出转矩-转速和转矩-电流特性。它进一步证实上述分析的结果。从图可见,空载电流在180°时明显增大了。由实验数据,进一步计算得到这三种情况下的最高效率ηmax见表3-26。
表3-26 三相无刷直流电动机导通角α与最高效率ηmax

此外,随着导通角的增大,电流的波动明显增大,图3-11是180°时电流波动的示波图。电流的波动自然引起转矩波动的明显增加。
对于较大功率的三相无刷直流电动机,为了得到较好的技术指标,应当采用逻辑电路来处理位置传感器的信号,以便得到最佳导通角120°。尽管其绕组利用率仅为1/3。
上述理论分析和试验结果均表明,增大每相导通角的方法是不可取的,最佳导通角是不发生死点的最小导通角αmin=2π/m。但在实际电机设计中,由于工艺分散性及考虑到温度、电源电压变化等因素,很难准确满足最佳导通角条件。可以采用逻辑门信号处理方法,获得每相导通角αmin的最佳工作状态。图3-12给出的是半桥式三相无刷直流电动机最佳导通角逻辑电路。输入X、Y、Z是由三相转子位置传感器来的信号,它的导通角大于120°,经逻辑处理后的三相信号A、B、C用来驱动换相开关,每相导通角变为120°。它们满足下面的关系式:

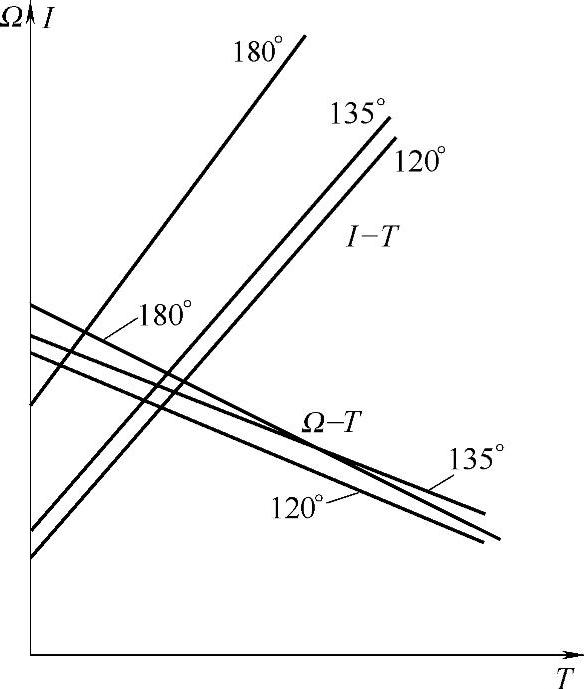
图3-10 半桥式三相无刷电动机不同导通角实验机械特性曲线
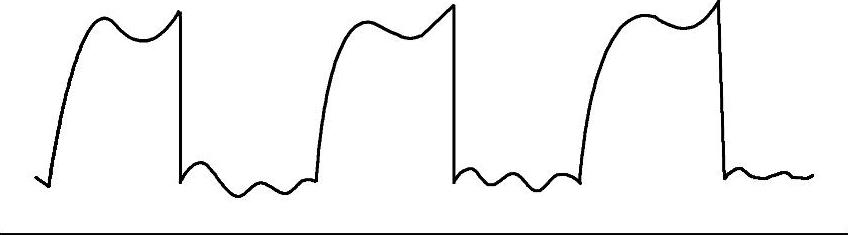
图3-11 导通角为180°时的空载电流示波图
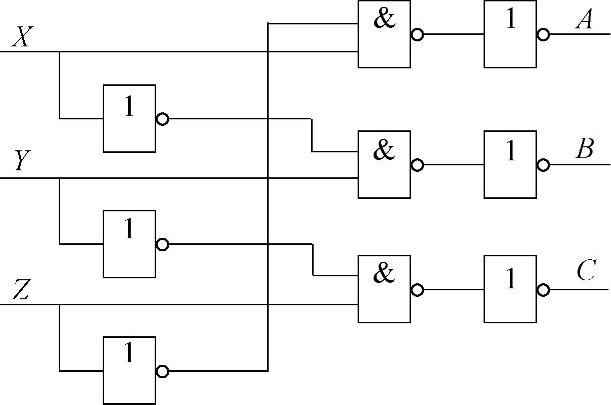
图3-12 半桥式三相无刷直流电动机最佳导通角逻辑电路
同样,对于四相电机,以m=4、αmin=π/2代入上面各有关公式,得到α=π/2~π的计算结果,见表3-27。
表3-27 半桥式四相无刷直流电动机在不同导通角时的性能变化
由表3-27可以清楚地看出,对于四相无刷直流电动机,随着导通角α从90°增大到180°,空载转速Ω0和阻尼系数D只稍有增加,而理想空载时的平均电流却大大增加了,增大的倍数是0.379/0.009=42倍。在180°时理想空载平均电流竟达到一相堵转电流的0.379倍。从而使电机的效率大大下降了。
对于较大功率的四相霍尔无刷直流电动机,欲得到较好的技术指标,同样也应当采用逻辑电路来处理霍尔传感器的信号,以便得到最佳导通角90°,尽管此时的绕组利用率仅为25%。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






