1.工业机器人的控制系统
(1)控制系统的功能 机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,应有如下基本功能:
1)记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。
2)示教功能:离线编程,在线示教,间接示教。在线示教包括示教盒和导引示教两种。
3)与外围设备联系功能:输入和输出接口、通信接口、网络接口和同步接口。
4)坐标设置功能:有关节、绝对、工具和用户自定义四种坐标系。
5)人机接口:示教盒、操作面板和显示屏。
7)位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制及动态补偿等。
8)故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。
(2)控制系统的组成
如图4-28所示,工业机器人控制系统通常由控制计算机、示教盒、操作面板、存储器、输入/输出接口、检测传感器和通信接口等组成。
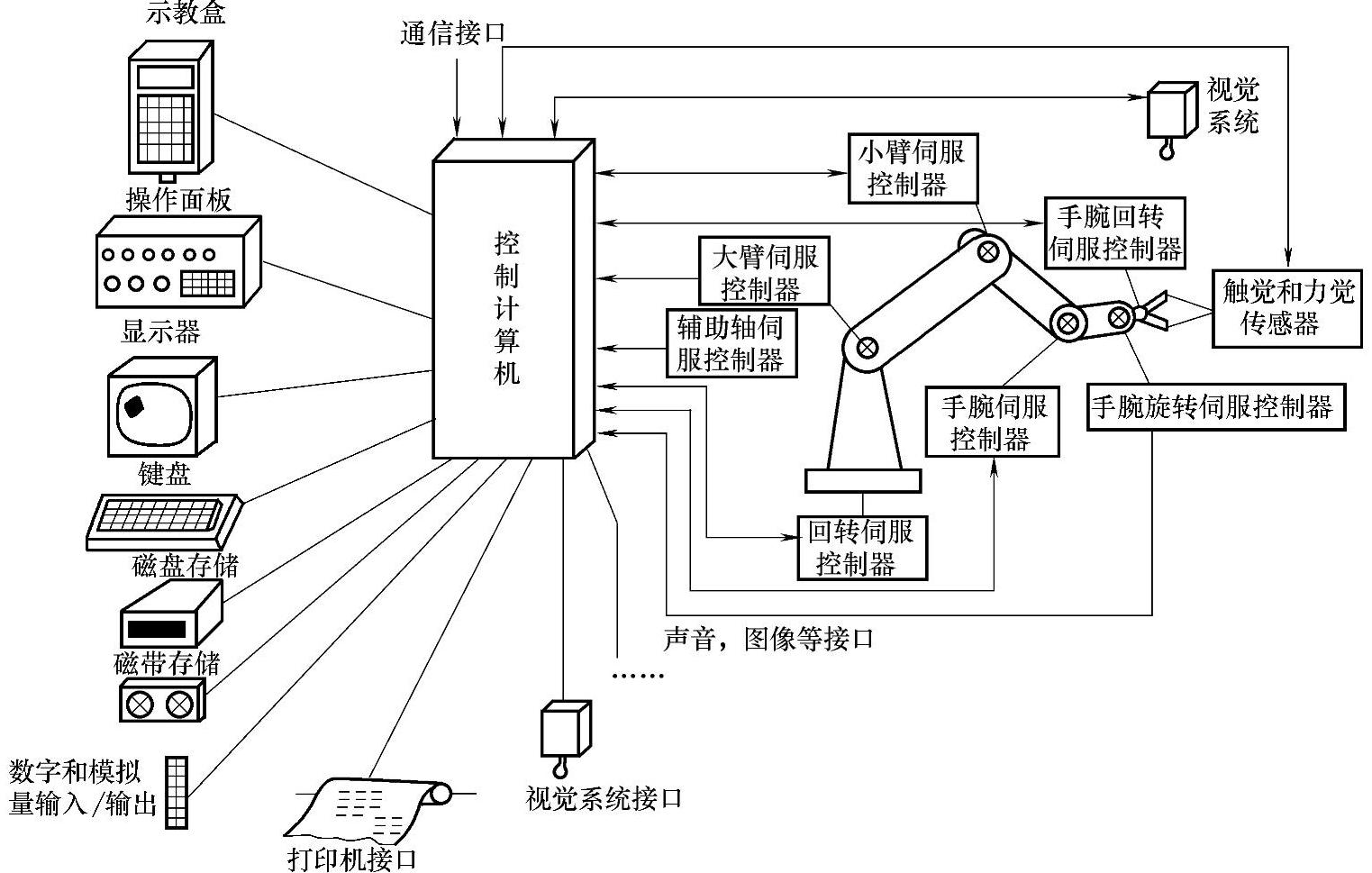
图4-28 工业机器人控制系统的组成
2.工业机器人的编程技术(www.daowen.com)
(1)机器人的示教 用机器人代替人进行作业时,必须预先对机器人发出指示,规定机器人进行应该完成的动作和作业的具体内容。这个过程就称为对机器人的示教,或对机器人的编程。对机器人的示教有不同的方法,要想让机器人实现人们所期望的动作,必须赋予机器人各种信息,首先是机器人动作顺序的信息及外部设备的协调信息;其次是机器人工作时的附加条件信息;最后是机器人的位置和姿态信息。前两个方面很大程度上是与机器人要完成的工作以及相关的工艺要求有关,所以我们重点介绍一下有关机器人的位置和姿态的示教。位置和姿态(简称位姿)的示教大致可有以下几种,如图4-29所示。
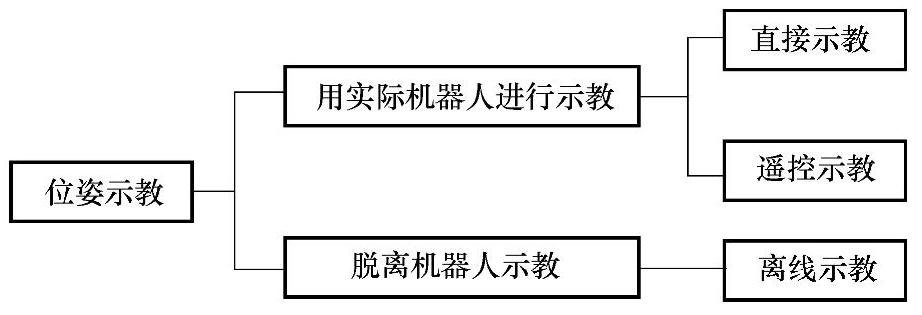
图4-29 位姿示教框图
1)直接示教。就是我们常说的手把手示教,由人直接搬动机器人的手臂对机器人进行示教,如示教盒示教或操作杆示教等。在这种示教中,为了示教方便及获取信息的快捷而准确,人们可选择在不同的坐标系下示教,可在关节坐标系、直角坐标系(极坐标系)以及工具坐标系、工件坐标系或用户自定义的坐标系下示教。
2)离线示教。不对实际作业的机器人直接进行示教,而是脱离实际作业环境生成示教数据,间接地对机器人进行示教。在离线示教(离线编程)中,通过使用计算机内存储的模型(CAD模型),不要求机器人实际产生运动,便能在示教结果的基础上对机器人的运动进行仿真,从而确定示教内容是否恰当及机器人是否按人们期望的方式运动。
对机器人的示教方式分为点位控制示教和轮廓控制示教两种。点位控制示教的原理是逐一使每个轴达到需要编程点位置;轮廓控制示教指握住示教臂,以要求速度通过所给路线。机器人示教再现的工作原理如图4-30所示。分为两个阶段,即示教阶段和工作再现阶段。在示教阶段,拨动示教盒按钮或手握机器人手臂,使之按需要姿势和路线进行工作,示教信息存储在记忆装置中;在工作再现阶段,从记忆装置调用存储信息,再现示教阶段动作。
机器人示教的优点是通过示教直接产生控制程序,无需手工编程,简单方便,适用于大批量生产。不足之处是轨迹精确度不高,需要存储容量大。
(2)机器人编程语言 机器人编程语言是人与机器人之间进行信息交换的程序语言,它伴随着机器人的诞生而问世。目前,世界上已有众多的机器人语言,在应用的机器人语言尽管种类很多,但根据作业描述水平的高低,通常可将机器人语言分为如下三个不同的级别。
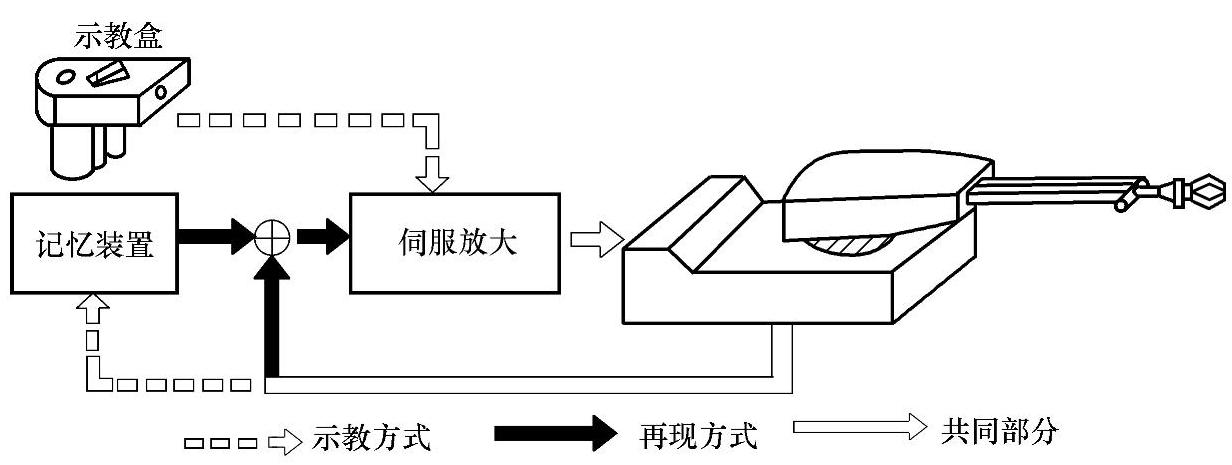
图4-30 机器人示教再现的工作原理
1)动作级语言。这种语言是以机器人的运动作为描述的对象,是由控制手爪从一个位置到另一位置的一系列命令组成,每一个命令对应一个动作。如定义运动序列的基本语句格式为:MOVE TO<destination>
动作级语言的代表是VAL语言,其语句简单,易于编程。动作级语言的缺点是不能进行复杂的数学计算;仅能接受传感器的开关信号,不能接受复杂的传感器信息;和其他计算机通信能力很差。
2)对象级语言。该类语言弥补了动作级语言的不足,是以描述操作物体之间的关系为中心的语言,通过对操作物体之间关系的描述使机器人动作。这类语言的典型代表有AML、AUTOPASS等。其功能有:①运动控制,具有与动作语言类似的功能。②处理传感器的信息,可以接受比开关信号更复杂的传感器信号,并可利用传感器的信号进行控制、监督以及修改和更新环境模型。③通信和数字运算,能方便地和计算机的数据文件进行通信,数字计算功能强,可以进行浮点运算。此外,对象级语言具有很好的扩展性,用户可以根据实际需要扩展语言的功能,增加控制指令。
3)任务级语言。任务级语言是比较高级的机器人语言,这类语言允许使用者对工作任务所要求达到的目标直接下命令,不需要规定机器人所做的每一个动作的细节。只要按某种原则给出最初的环境模型和最终的工作状态,机器人可自动进行推理、计算,最后自动生成机器人的动作。任务级语言编程系统必须有能力自动地完成许多规划方面的任务。例如,当发出抓住螺栓的指令时,任务级语言系统能规划一条运动的路径,并做到与周围任何一个障碍物不发生碰撞;然后自动地在螺栓上选择一个很好的抓取点,并且能够抓住它。到目前为止,还未发现有关真正的任务级语言编程系统的报导。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






