机器人的自由度(degree of freedom,DOF)指其末端执行器相对于参考坐标系能够独立运动的数目,但并不包括末端执行器的开合自由度。自由度是机器人的一个重要技术指标,它是由机器人的结构决定的,并直接影响到机器人能否执行相适应的动作。
2.工作空间
工作空间指机器人末端上参考点所能达到的所有空间区域。机器人的工作空间取决于机器人的结构型式和每个关节的运动范围。图4-27所示分别为直角坐标型机器人、圆柱坐标型机器人、球坐标型机器人和关节坐标型机器人的工作空间。
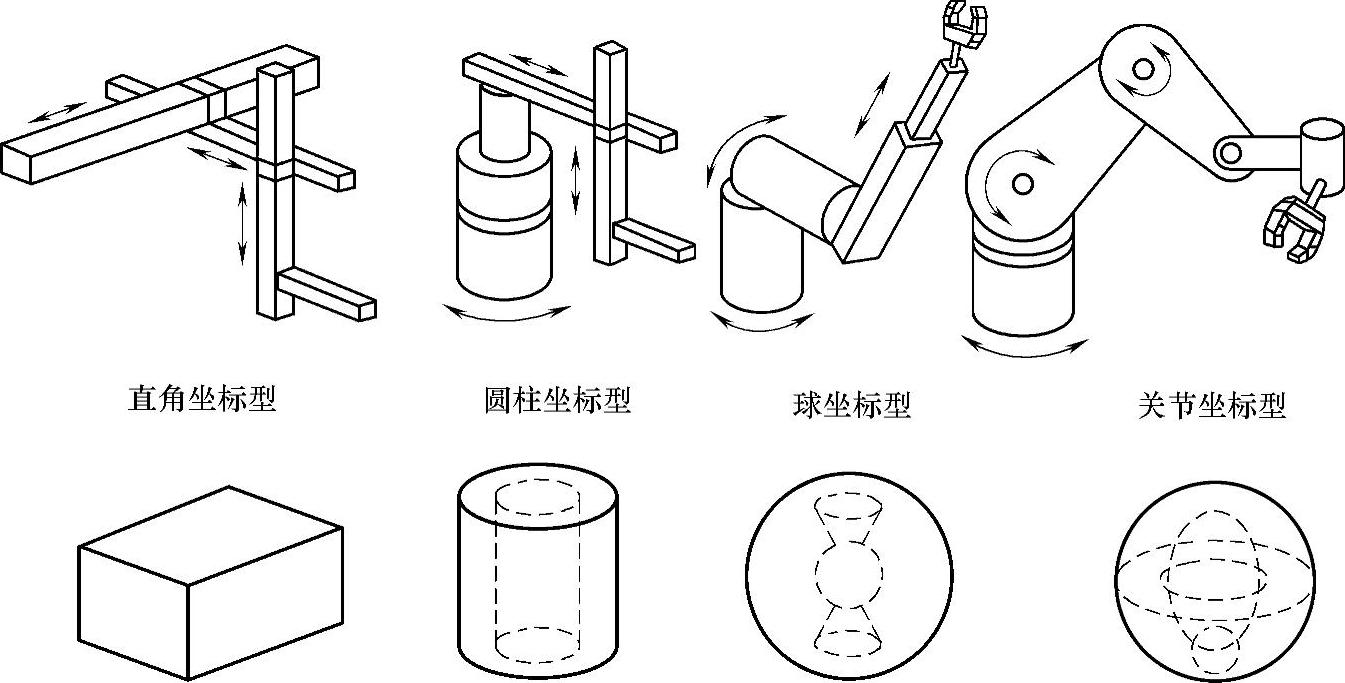
图4-27 常见工业机器人的大致工作空间
3.机器人额定速度与额定负载
机器人在保持运动平稳性和位置精度前提下所能达到的最大速度称为额定速度(rated velocity)。其某一关节运动的速度称为单轴速度,由各轴速度分量合成的速度称为合成速度。机器人在额定速度和行程范围内,末端执行器所能承受负载的允许值称为额定负载(rated load)。极限负载指在限制作业条件下,保证机械结构不损坏,末端执行器所能承受负载的最大值。(www.daowen.com)
对于结构固定的机器人,其最大行程为定值,因此额定速度越高,运动循环时间越短,工作效率也越高。而机器人每个关节的运动过程一般包括起动加速、匀速运动和减速制动三个阶段,如果机器人负载过大,则会产生较大的惯性,造成起动、制动阶段时间延长,从而影响机器人的工作效率。对此,就要根据实际工作周期来平衡机器人的额定速度与额定负载。
机器人分辨率指机器人各关节运动能够实现的最小移动距离或最小转动角度,它有控制分辨率(control resolution)和空间分辨率(spation resolution)之分。
控制分辨率是机器人控制器根据指令能控制的最小位移增量。若机器人末端执行器借助于二进制n位指令移动距离为d,则控制分辨率为d/2n;对于转动关节,则为角度的运动范围除以2n得到控制角分辨率,再乘以臂长得到末端执行器的控制分辨率。空间分辨率是机器人末端执行器运动的最小增量。空间分辨率是一种包括控制分辨率、机械误差及计算机计算时的圆整、截尾和近似计算误差在内的联合误差。
机器人多次执行同一位姿指令,其末端执行器在指定坐标系中实到位姿与指令位姿之间的偏差称为机器人位姿准确度(pose accuracy)。位姿准确度主要包括机械误差、控制算法误差和分辨率系统误差。机械误差主要产生于传动误差、关节间隙和连杆机构的挠性等;控制算法误差主要是由一些算法的数值解法或数据精度的舍入造成的;分辨率系统误差则是由于小于基准分辨率的变位既无法编程也无法检测而产生的误差。
在相同条件下,用同一方法操作机器人时,重复多次所测得的同一位姿散布的不一致程度称为位姿重复性(pose repeatability)。因其不受工作载荷变化的影响,故通常用位姿重复性这一指标作为衡量示教—再现方式工业机器人水平的重要指标。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






