机器人的分类方法很多,在国际上没有制订统一的标准。这里仅按机器人的系统功能、结构型式、驱动方式及控制方式进行分类。
1.按系统功能分类
1)专用机器人。在固定地点以固定程序工作的机器人。其结构简单、工作对象单一、无独立控制系统、造价低廉,如附设在加工中心上的自动换刀机械手。
2)通用机器人。具有独立控制系统,通过改变控制程序能完成各种作业的机器人。其结构复杂,工作范围大,定位精度高,通用性强,适用于不断变换生产品种的柔性制造系统。
3)示教再现式机器人。具有记忆功能,在操作者示教操作后,能按示教的顺序、位置、条件与其他信息反复重现示教作业。
4)智能机器人。采用计算机控制,具有视觉、听觉、触觉等多种感觉功能和识别功能的机器人。通过比较和识别,自主做出决策和规划,自动进行信息反馈,完成预定的动作。
2.按结构型式分类
工业机器人最常见的结构型式是用其坐标特性来描述的。按坐标型式的不同可分为直角坐标型机器人、圆柱坐标型机器人、极坐标型机器人和关节坐标型机器人。
1)直角坐标型机器人由三个线性关节组成,如图4-23所示。这三个关节可确定末端执行器的位置,通常还带有附加的旋转关节用来确定末端执行器的姿态。这一类机器人位置精度高,控制无耦合、简单,但结构复杂,占地面积大。
2)圆柱坐标型机器人由两个滑动关节和一个旋转关节来确定末端执行器的位置,如图4-24所示。也可再附加一个旋转关节来确定部件的姿态。其位置精度仅次于直角坐标型机器人,控制简单,但结构庞大,移动轴的设计复杂。
3)极坐标型(球坐标型)机器人是利用一个滑动关节和两个旋转关节来确定末端执行器的位置,如图4-25所示。也可再附加一个旋转关节来确定部件的姿态。这类机器人占地面积小,结构紧凑,但有平衡问题,位置误差与臂长有关。
4)关节坐标型机器人的关节全都是旋转的,类似于人的手臂,是工业机器人中最常见的类型,如图4-26所示。该类机器人结构紧凑,占地面积小,工作空间大,但是位置精度较差,控制存在耦合,比较复杂。
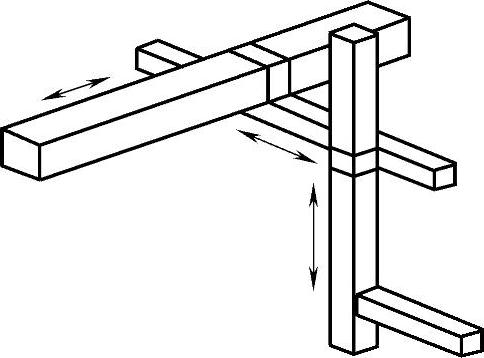
图4-23 直角坐标型机器人
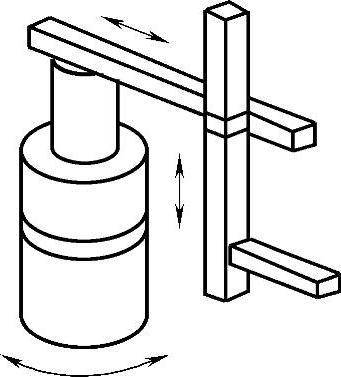
图4-24 圆柱坐标型机器人(www.daowen.com)
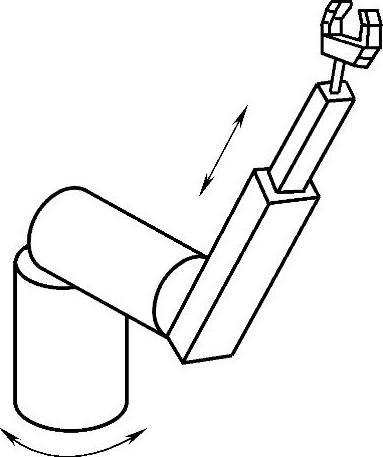
图4-25 极坐标型机器人
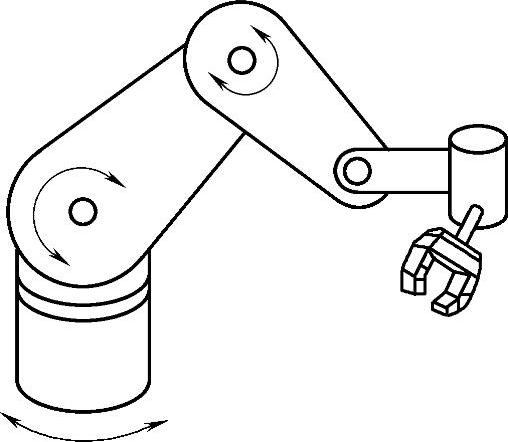
图4-26 关节坐标型机器人
3.按驱动方式分类
1)气压驱动机器人。以压缩空气作为动力源驱动执行机构运动的机器人。具有动作迅速、结构简单、成本低廉的特点,适用于高速、轻载、高温和粉尘大的环境作业。
2)液压驱动机器人。采用液压元器件驱动,具有负载能力强、传动平稳、结构紧凑及动作灵敏的特点,适用于重载、低速驱动的场合。
3)电气驱动机器人。用交流或直流伺服电动机驱动的机器人。不需要中间转换机构,机械结构简单、响应速度快、控制精度高,是近年来常用的机器人驱动结构。
4.按控制方式分类
按照控制方式可把机器人分为非伺服控制机器人和伺服控制机器人。
非伺服控制机器人按照预先编好的程序进行工作,使用定序器、插销板、终端限位开关及制动器等来控制机器人的运动。
与非伺服控制机器人相比,伺服控制机器人具有较为复杂的控制器、计算机和机械结构,带有反馈传感器,拥有较大的记忆存储容量。这意味着能存储较多点的地址,运行更为复杂平稳,编制和存储的程序可以超过一个,因而该机器人可以有不同的用途,并且转换程序所需的停机时间极短。
伺服控制机器人又可分为点位伺服控制机器人和连续轨迹伺服控制机器人。点位伺服控制机器人一般只对其一段路径的端点进行示教,而且机器人以最快和最直接的路径从一个端点移到另一个端点,点与点之间的移动总是有些不平稳。这种控制方式简单,适用于上下料、点焊等作业。连续轨迹伺服控制机器人能够平滑地跟随某个规定的轨迹,它能较准确地复原示教路径。
无论是哪一类工业机器人,都要对有关位置和速度(以及可能的一些其他物理量)的信息进行连续监测,并反馈到与机器人各关节有关的控制系统中。因此,各轴都是闭环的。闭环控制的应用使机械手的构件能按指令在各轴行程范围内的任何位置移动。此外,还可以控制不同轴上的运动在运动端点之间的速度、加速度、负加速度和冲击(即加速度对时间的导数),可以大大降低机械手的振动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





