工业机器人一般由执行系统、驱动系统、控制系统、传感系统和输入/输出系统等组成。
1.执行系统
执行系统是工业机器人为完成抓取工具(或工件)实现所需各种运动的机构部件,是一组具有与人手、脚功能相似的机械机构,又称操作机。如图4-22所示。其通常包括以下几部分:
1)手部。又称抓取机器或夹持器或终端效应器,用于直接抓取工件或工具。在手部可安装某些专用工具,如焊枪、喷枪、电钻或电动螺钉(母)拧紧器等,就构成了专用的特殊手部。专用工业机器人的所用手部有机械式、真空式、磁力式及黏附式手爪。
2)腕部。是连接手部与臂部的部件,用以支撑和调整末端执行器(手部)的姿态,确定物件的姿态(方向)。
3)臂部。是支撑腕部和手部的部件,由操作机的动力关节和连接杆件等构成。用以承受工件、夹具等的载荷,改变它们的空间位置并将它们送至预定位置。
4)机身。又称为立柱,是支撑臂部的部件,用以扩大臂部的活动范围。
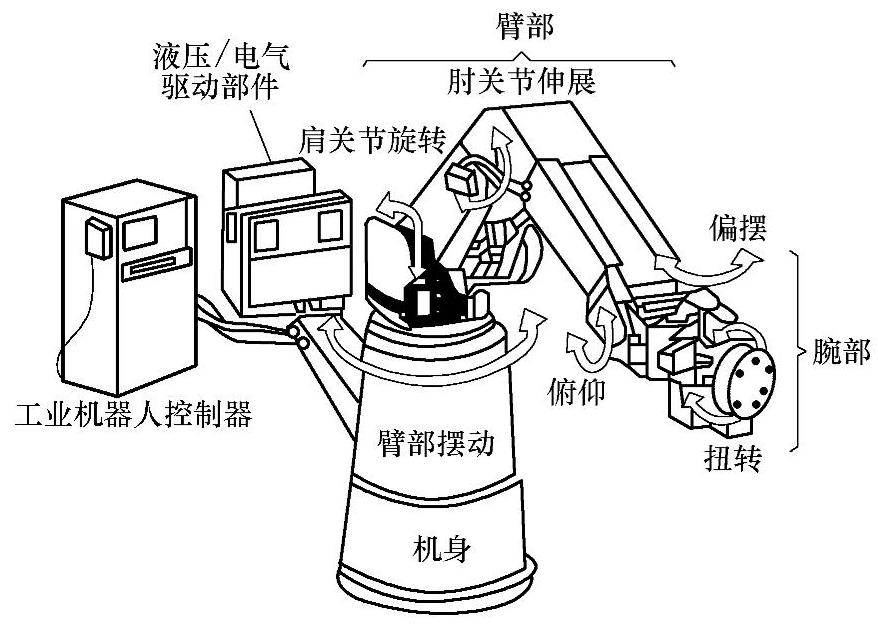
图4-22 工业机器人的执行系统
5)机座及行走机构。是支撑整个工业机器人的基础件,用以确定或改变整台机器人的位置。
2.驱动系统
驱动系统是机器人执行作业的动力源,按照控制系统发出的控制指令驱动执行机构完成规定的作业。常用的驱动系统有:(https://www.daowen.com)
1)液动式驱动系统。液压驱动系统通常由液压机(各种油缸、油马达)、伺服阀、油泵及油箱等组成,由此驱动机器人的执行机构进行工作。通常它具有很大的抓举能力(高达几百kg以上),其特点是结构紧凑,动作平稳,耐冲击,耐振动,防爆性好,但液压元件要求有较高的制造精度和密封性能,一旦漏油将污染环境。
2)气动式驱动系统。其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便,动作迅速,结构简单,造价较低,维修方便。但难以进行速度控制,气压不可太高,故抓举能力较低。
3)电动式驱动系统。电力驱动是目前机器人使用最多的一种驱动方式。其特点是电源方便,响应快,驱动力较大(关节型的持重已达400kg),信号检测、传递、处理方便,并可以采用多种灵活的控制方案。驱动电动机一般采用步进电动机、直流伺服电动机以及交流伺服电动机(其中交流伺服电动机为目前主要的驱动形式)。由于电动机速度快,通常须采用减速机构(如谐波传动、RV摆线针轮传动、齿轮和多杆机构等)。目前,有些机器人已开始采用无减速机构的大转矩、低转速电动机进行直接驱动,这既可以使机构简化,又可提高控制精度。
4)混合驱动系统。液-气或电-液或电-气混合驱动系统。
3.控制系统
控制系统是工业机器人的指挥系统,它控制驱动系统,让执行机构按照规定的控制指令进行工作。它类似于人的大脑,控制着机器人的全部动作,并记忆人们示教的指令信息,如动作顺序、运动轨迹及运动速度等,可再现控制所储存的示教信息。工业机器人功能的强弱以及性能的优劣,主要取决于控制系统。一个良好的控制系统要有灵活、方便的操作方式,以及多种形式的运动控制方式和安全可靠性。
4.传感系统
为了使工业机器人正常工作,必须与周围环境保持密切联系,除了关节伺服驱动系统的位置传感器(称作内部传感器)外,还要配备视觉、力觉、触觉、接近觉等多种类型的传感器(称作外部传感器)以及传感信号的采集处理系统。
5.输入/输出系统
为了与周边系统及相应操作进行联系与应答,还应有各种通信接口和人机通信装置,工业机器人提供了内部PLC,它可以与外部设备相连,完成与外部设备间的逻辑与实时控制。一般还有一个以上的串行通信接口,以完成磁盘数据存储、远程控制及离线编程、双机器人协调等工作。新型机器人还包括语音合成和识别技术以及多媒体系统,实现人机对话。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





