
护理机器人可用于周到地照顾患者,其与一般工业机器人的主要区别在于人机接口的柔顺性和端点阻抗的可控性。护理机器人一般采用蓄电池供电,需要提高能量的利用率,延长其工作时间;行走和停靠要平稳,转向半径要小,适合在狭窄空间工作;机械手要有力学反馈,用适度的力将物体抓起或托起;图像识别,自主导航和具有一定的判断能力能让机器人在无人操作的情况下自主执行一些简单的任务;人机交互系统(如界面操作、语音、手势和身体语言等)能让机器人更好地理解操作人员的意图,执行任务。
固定作业式护理机器人(health care robot,HCR)实际上是一个以工作站形式进行工作的机械手。机械手放在平台上,在平台四周的相应位置上放置着残疾人日常生活工作所需要的物品及设备(如药品、饮料、书籍、磁盘、计算机、电话等)。在工作站内根据预先编制的程序,机械手可以代替残疾人完成一系列工作。
法国原子能协会研制的Master护理机器人系统,其输入是两只按键和一个操纵杆,另外还有语音控制输入。受控设备除了机械手外还有许多种环境设备(如翻页器、电话、电灯、音响、电视、计算机等)。Master的自动程序可实现喝水、吃饭、抽烟、下棋、翻书、打电话、听音响、看电视、装磁盘等工作。由此可见,Master的功能是很全面和完备的,它被公认为是具代表性的固定式HCR的杰作之一。
移动作业式护理机器人由清华大学精密仪器系研制。它以高位截瘫患者为护理对象,可在无人看护的情况下独立承担4-8小时的护理工作,患者可借助它完成取药、饮水、翻书、操纵家用电器等工作。机器人由自动导引小车在患者与装有受控设备的工作站间移动。
此系统的接口方式以语音控制为主,控制单元是一台多媒体计算机。患者可通过直接控制模式来控制机器人的每一个动作,也可通过自动控制模式使机器人完成某项工作。另外,患者可随时调用环境控制模式来控制环境设备。对环境的控制不影响对机器人的控制。
医院机器人系统主要是指医院内部的移动机器人,其主要功能是完成医院内部类似提升患者,然后搬运患者去卫生间或更换床单等工作,从而把医护人员从繁重的体力劳动中解放出来。医院机器人系统有时也用来运送食物、药品及一些医疗器械、患者病例档案等。
日本机械工程研究所(MEL)开发的护理机器人MEL KONG,专门用来照顾那些不便走动的患者,可以轻松平稳地将患者从床上托起,并将其送往卫生间、浴室或餐厅等地。该机器人的一些关键技术如停靠、行走、抓取、液压执行器、能源供给及人机界面等都已解决(见图3-3-5—7)。
图3-3-5 日本机械工程研究所不同时期开发的护理机器人
 (www.daowen.com)
(www.daowen.com)
图3-3-6 日本机械工程研究所开发的护理机器人的工作情形
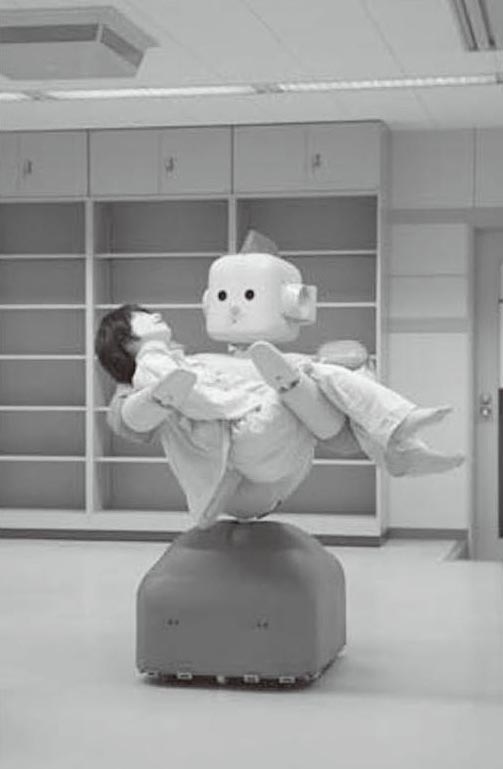
图3-3-7 日本机械工程研究所开发的护理机器人模拟搬运患者
随着现代电子、计算机和通讯技术的发展和推广,残疾人的康复和护理已经由最初的人工护理发展到残疾人自助型的辅助装置。高水准的家庭护理工作站和护理机器人也是目前国际上的发展方向。护理机器人技术主要向智能化、人性化和模块化等几个方面发展。
残疾人环境控制装置和护理装置建立了残疾人与环境间的桥梁,使患者不同程度地恢复了生活自理的能力,因而增强了他们生活的信心和勇气,提高了他们的生活质量,减轻了家庭和社会的负担。同时,随着社会的进步,经济的发展,人均寿命不断延长,老年人口比例增加,对家庭护理的需求也越来越大。因此,残疾人环境控制装置和护理装置的研究今后将在国内会有较大的发展。
(周红俊 汪家琮 张缨)
思考题
对残疾人环境控制装置和护理机器人的设计有什么建议?
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






