采用本章的设备调度与托盘物资上架任务分配策略,对某仓库库房的四向穿梭式自动化密集仓储系统进行分析。该系统设置4台垂直提升机,配有理货组盘作业人员、叉车和四向穿梭车若干,如图6-4所示。
组盘作业区到4台垂直提升机的距离分别为20m、22m、60m、62m,叉车运送托盘物资的平均速率为60m/min。若按照4台垂直提升机平均分配托盘物资上架任务,叉车将托盘物资运送至货架端口,则预期叉车运输(计算往返)的平均服务率 托盘/min。在模糊控制任务分配策略下,实际的叉车运输平均服务率
托盘/min。在模糊控制任务分配策略下,实际的叉车运输平均服务率 。
。
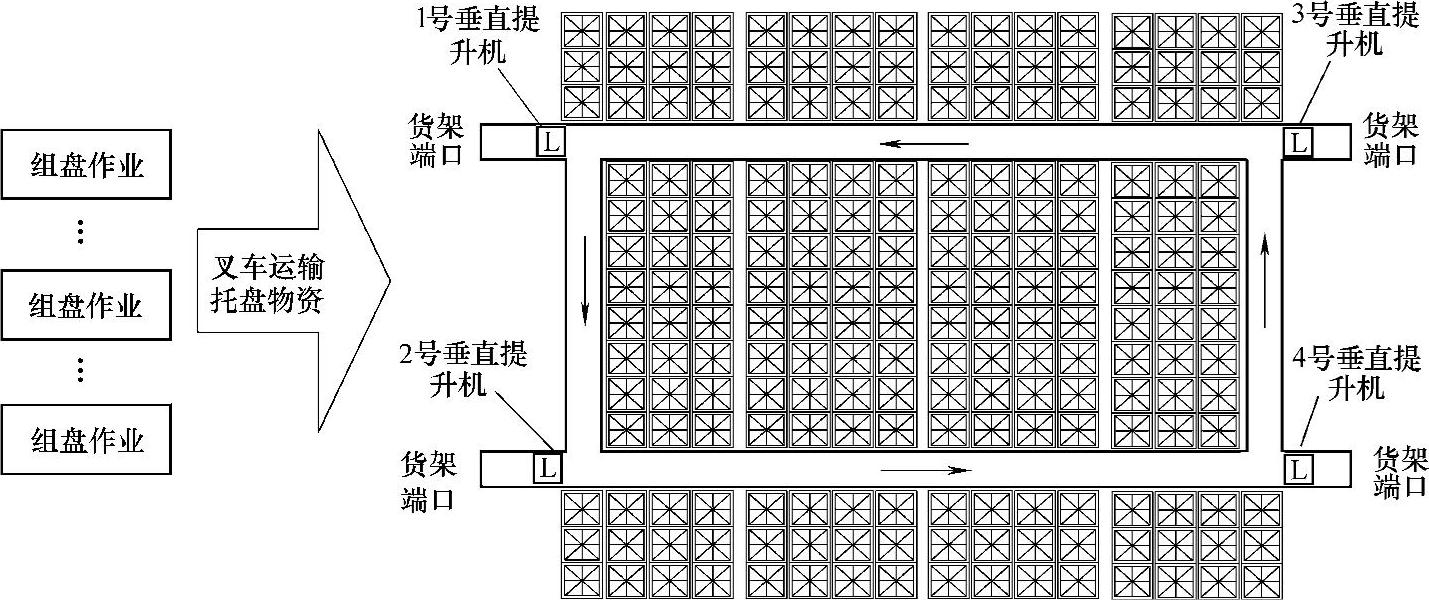
图6-4 某仓库四向穿梭式自动化密集仓储系统布局
垂直提升机将托盘物资从货架端口送至指定货架层平均需要0.6min(含叉车放置托盘物资到端口后的射频识读和人工确认时间),提升机换层的平均服务率μ3=1.667托盘/min。
托盘物资的入库货位在货架内随机分布,货架端口与存储货位之间可能的最大路径距离为60m,四向穿梭车将托盘物资从货架端口运送至存储货位的平均路径距离为30m,四向穿梭车运送托盘物资的速率为45m/min(不考虑起停转向所需时间),预期四向穿梭车运输(计算往返)的平均服务率 托盘/min。
托盘/min。
若库房现到达一批物资,该批次物资预计可组盘为180托盘,组盘作业的平均服务率μ1=1托盘/min,拟在60min内完成该批次物资入库。
由式(6-1)可得,该批次物资的等效物资到货率λ1=3托盘/min。由式(5-3)~式(5-6)可得,配有理货组盘作业人员的最小数量为3,作业叉车的最小数量为5,垂直提升机的最小数量为2,四向穿梭车的最小数量为4。注意:由于库房内可用的垂直提升机数量为4台,采用模糊控制策略分配托盘物资上架任务后,实际的叉车运输平均服务率 ,所需的作业叉车最小数量应小于或等于5。(https://www.daowen.com)
,所需的作业叉车最小数量应小于或等于5。(https://www.daowen.com)
管理控制信息系统调度3个组盘作业服务台进行组盘作业,开启4台垂直提升机,采用模糊控制策略分配托盘物资上架任务,各垂直提升机前托盘物资的排队队长情况如图6-5a所示,等待时长如图6-5b所示。若将托盘物资均匀分配给各垂直提升机(不采用模糊控制策略分配任务),则排队队长情况如图6-5c所示,等待时长如图6-5d所示。
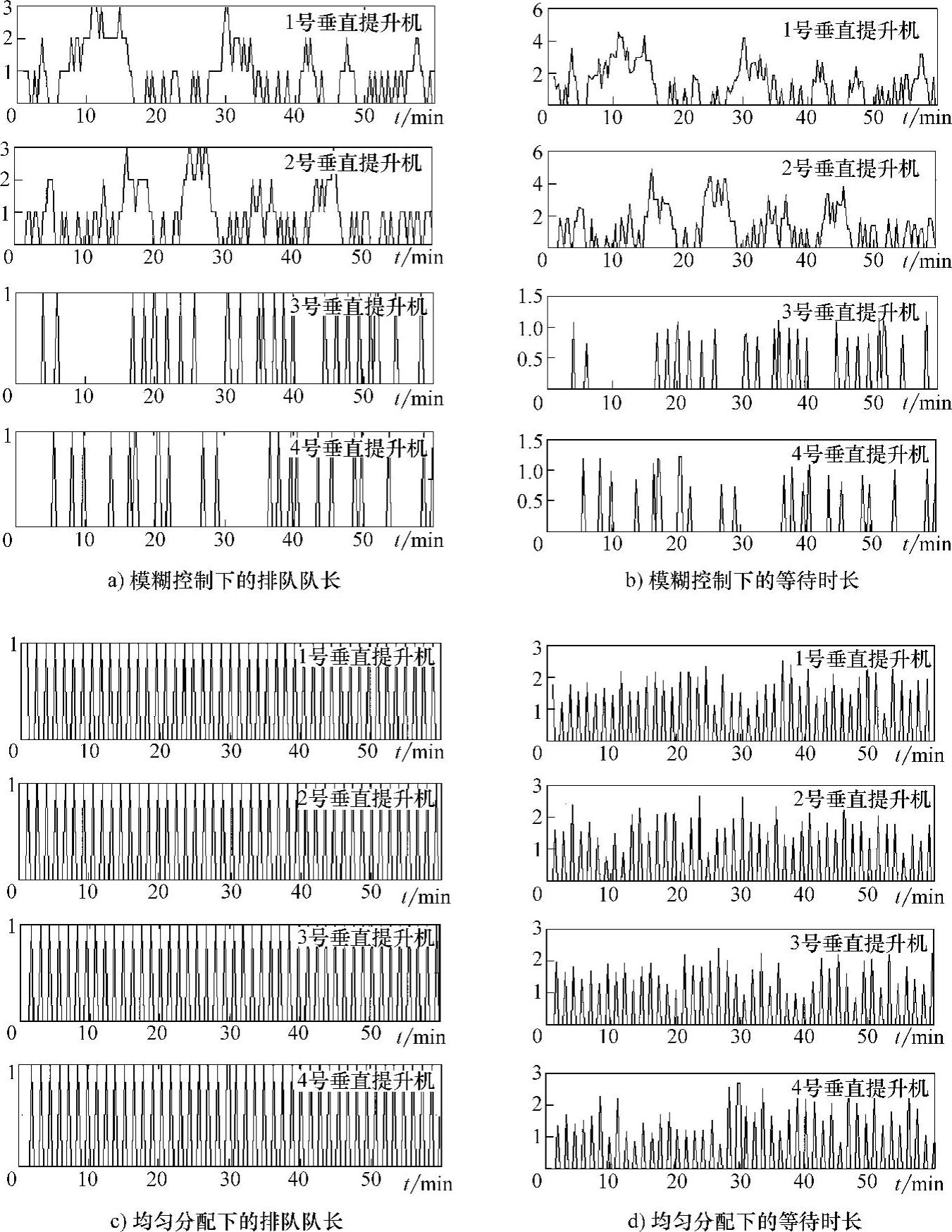
图6-5 某仓库物资入库过程中各提升机的排队情况
由图6-5可知,当采用模糊控制时,由于第1、第2号垂直提升机与组盘区的距离较近,为其分配的托盘物资比第3、第4号提升机多,提升机换层环节前最多出现了长度为3的托盘物资排队队列,排队等待时长最长达到5min。当采用均匀分配时,各个提升机分配的托盘物资数量相同,排队队长最大为1,排队等待时长最长为3min。
进一步分析叉车运输服务中心的参数,采用模糊控制策略时,叉车运输总路径为11480m(相当于叉车作业时间191.3min),60min作业时间内所需的最小作业叉车数量为4;若不采用模糊控制策略,而是将托盘物资上架任务均匀分配给各台垂直提升机,则叉车运输总路径为14760m(相当于叉车作业时间246min),60min作业时间内所需的最小作业叉车数量为5。可见,通过模糊控制策略优化分配托盘物资上架任务,缩短了物资入库作业所需的运输路径,提高了作业效率,降低了入库作业成本。
对出库作业过程的任务分配进行类似分析,该模糊控制任务分配也有较好的结果。模糊控制可缩短出库物资运输路径,提高下架作业效率,降低出库作业成本。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






