货架主轨道相互连接构成主轨道网。主轨道网包含轨道和轨道节点,两条或多条轨道通过轨道节点连接。四向穿梭车在轨道上直线行驶,在轨道节点处实现转向(或延续直行)。为实现主轨道网上同时运行多台四向穿梭车,应限制交通规则。
交通规则1:主轨道应定向,即在单条主轨道上,四向穿梭车只能单向行驶。若允许四向穿梭车在单条轨道上双向行驶,则当该轨道上有2台以上四向穿梭车且行驶方向不同时,会出现路径死锁。为避免在轨道内出现路径死锁,四向穿梭车在单条轨道上应单向行驶,在轨道节点处改变行驶方向。
交通规则2:轨道节点应设置节点使用权。为避免在节点处发生碰撞,四向穿梭车通过轨道节点前应申请节点使用权,获得使用权后才能通过节点。
将主轨道建模为图G=(V,E),其中轨道节点建模为图的顶点V,主轨道建模为图的边E。由于主轨道限定单向运行,为保证四向穿梭车能够到达主轨道上的任意位置,图G必须是强连通可定向的。
设计原则1:主轨道网的任何一条轨道总是属于某一个圈。该结论可根据罗宾斯定理得证。
推论1:主轨道网的主轨道应当连通,且网内没有割边。该结论可根据罗宾斯定理得证,且与设计原则1互为充要条件。
对图G进行定向,要求定向得到的有向图不仅是强连通的,还应避免路径死锁。为达到这一目标,图G定向后的所有节点,其入度和出度均应大于0,即δ+(G)>0,δ-(G)>0。
主轨道网定向方法:主轨道网定向,选定一个主要方向,一个次要方向,先主后次依次定向。货架层内主轨道通常沿两个互相垂直的方向布设,选择其中一个为主要方向(如选择沿托盘出入方向为主要方向),另一个方向为次要方向(如选择垂直托盘出入方向为次要方向)。先对主要方向的主轨道定向:相邻的两条主轨道选择相反方向;再对次要方向主轨道定向:依次为每段主轨道选择方向,使每段主轨道与已定向主轨道相容。
按照主轨道网定向方法的定向结果满足设计原则1,且有最小顶点入度δ+(G)>0,最小顶点出度δ-(G)>0。
证明:归纳法。
最简单的主轨道网为4条主轨道组成的矩形网,按照主轨道网定向方法对该网定向,可得图4-3a。定向后,得到只含有一个圈的主轨道网,记为G0,其4个顶点分别为v11、v12、v21、v22。显然,对G0采用主轨道网定向方法定向得到的结果满足设计原则1。
除G0外的其他类型主轨道网均可视为对G0沿主要方向和次要方向的单次或多次扩展。下面首先考虑单次扩展。(https://www.daowen.com)
(1)主轨道网为G0沿主要方向的扩展
1)如果其沿主要方向的新增主轨道与主要方向原有主轨道直接相连,其相对于G0沿主要方向新增边v12v13和v22v23,沿次要方向新增边v13v23,如图4-3b所示。按照主轨道网定向方法,沿主要方向的边与G0的定向保持一致,即v12→v13和v23→v22,新增的次要方向边v13v23选择与边v12v22相同的定向(与v12→v13和v23→v22定向相容),即v13→v23。此时,v11v12v13v23v22v21形成一个圈,新增边v12v13、v22v23和v13v23位于该圈上。
2)如果其沿主要方向的新增主轨道与主要方向原有主轨道不直接相连,不妨假设新增边v′22v23与v22v21不直接相连,而通过沿次要方向的新增边v′22v22连接,如图4-3c所示。可用沿次要方向的轨道将边v23v′22与v22v21相连,然后采用与图4-3b相同的定向。此时,v11v12v13v23v′22v22v21形成一个圈,新增边v12v13、v13v23、v23v′22和v′22v22位于该圈上。
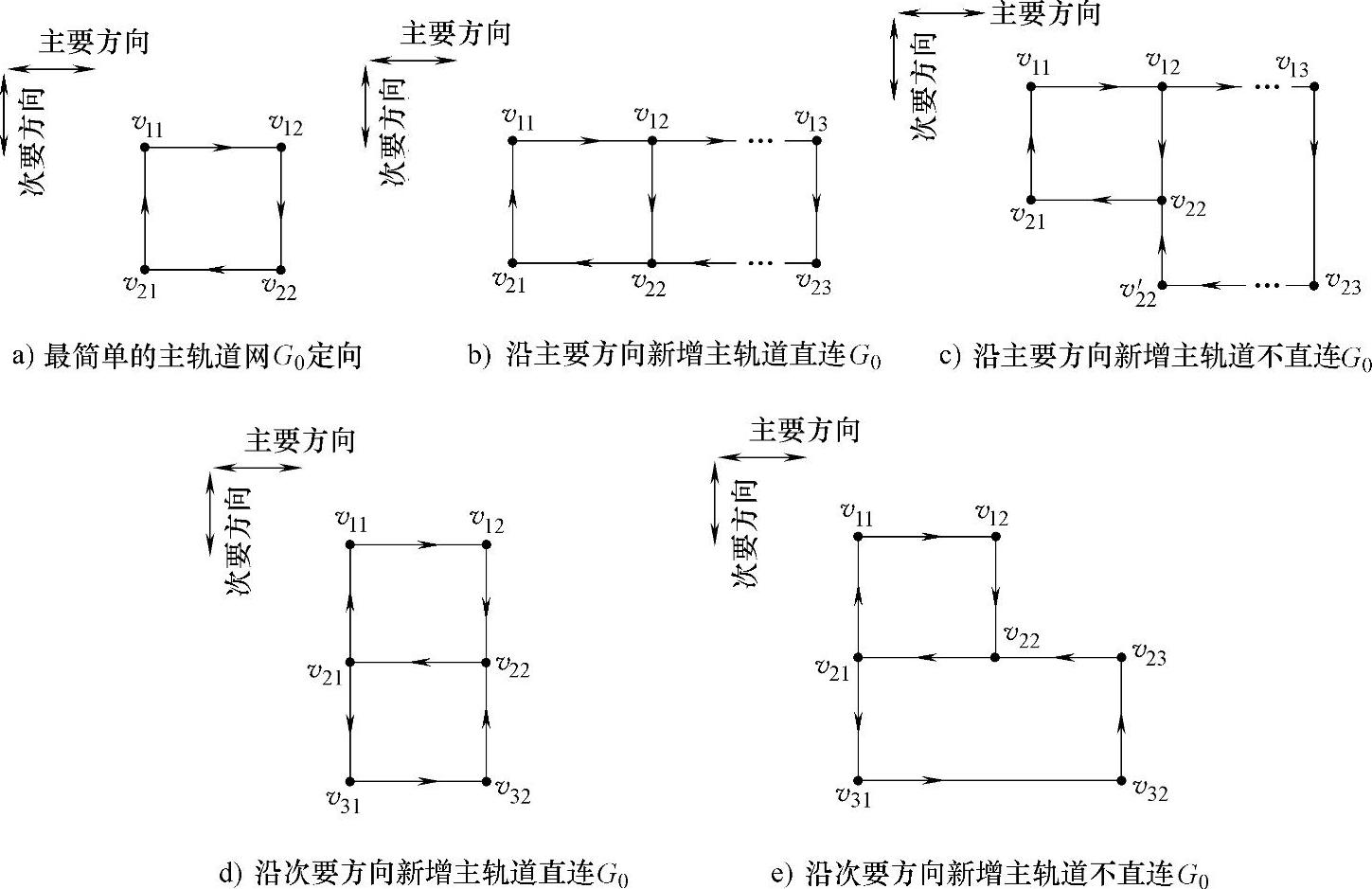
图4-3 主轨道网定向
(2)主轨道网为G0沿次要方向的扩展 沿主要方向新扩展的边v31v32选取与v22v21相反的方向。
1)如果沿次要方向的新增主轨道与次要方向原有主轨道直接相连,如图4-3d所示。则此时v21v31v32v22形成一个圈,新增边v21v31、v31v32、v32v22位于该圈上。
2)如果沿次要方向的新增主轨道与次要方向原有主轨道不直接相连,如图4-3e所示,则此时v21v31v32v23v22形成一个圈,新增边v21v31、v31v32、v32v23和v23v22位于该圈上。
综上所述,若主轨道网是对G0沿主要方向和次要方向的单次扩展,则按照主轨道网定向方法的定向结果满足设计原则1。
若主轨道网是对G0沿主要方向和次要方向的多次扩展,可按类似方法证明,主轨道网定向方法的定向结果仍满足设计原则1。
由于G0和G0的扩展均没有割边,且定向后的边都属于一个圈,显然定向后其最小顶点入度δ+(G)>0,最小顶点出度δ-(G)>0。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




