例6.1的最短路问题具有以下特征:
1)问题具有多阶段决策的特征。
2)每一阶段都有相应的“状态”与之对应。
3)每一阶段的某个状态都面临有若干个决策,选择不同的决策将会导致下一阶段不同的状态,同时,不同的决策将会导致这一阶段不同的距离。如图6-2所示的第1阶段状态v1,其决策是到达下一阶段点的选择。状态v1有3种选择,决策允许集合为{v2,v3,v4},也是第2阶段的状态集合。又如第2阶段状态v3,到下一阶段的选择有v5和v6,决策允许集合为{v5,v6}。同一阶段各状态的决策集合可能相同也可能不同。
4)每一阶段的最短路长(最优解)问题可以递推地归结为下一阶段各个可能状态的最优解问题,各子问题与原问题具有完全相同的结构。
动态规划解决问题的关键是将问题归结为一个递推过程,建立一个递推指标函数求最优解。如果不能建立递推函数则动态规划方法无效。
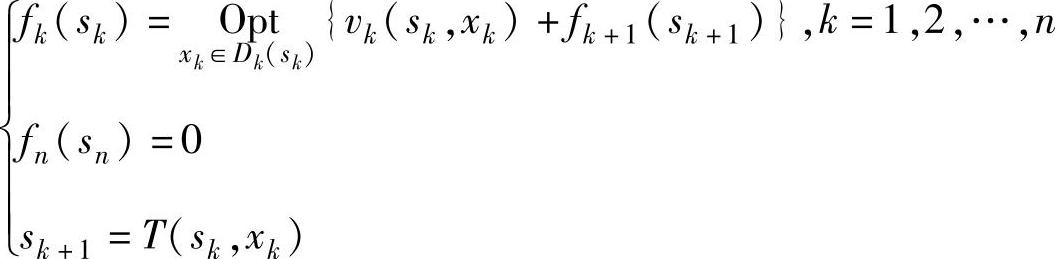
图6-2的递推指标函数为:

最优指标函数为:

式中,fk(sk)为阶段k状态为sk时到终点v10的最短距离; 为k+1阶段状态为sk+1到终点v10的最短距离;vk(sk,xk)是状态为sk选择决策xk时,sk到xk的距离;Dk(sk)为状态sk的决策集合。
为k+1阶段状态为sk+1到终点v10的最短距离;vk(sk,xk)是状态为sk选择决策xk时,sk到xk的距离;Dk(sk)为状态sk的决策集合。
式(6-1)是动态规划的基本方程或称为最优性方程。
当求出k+1阶段各状态的最优解(到终点的最短距离),利用式(6-1)就可以求出第k阶段各状态的最优解,依次类推,最后求出第1阶段状态v1的最优解(v1到v10的最短距离)。
式(6-1)的递推关系理解为:阶段k状态为sk到终点v10的最短距离归结为该状态选择决策xk后的距离vk(sk,xk)加上xk到v10的最短距离求最小值。例如求v3到v10的最短距离f2(v3)为:

动态规划基本原理是将一个问题的最优解转化为求子问题的最优解,研究的对象是决策过程的最优化,其变量是流动的时间或变动的状态,最后达到整体最优。
式(6-1)还描述了动态规划的最优性原理:如果点xk到终点v10的最短路线通过点vk+1,则点vk+1到终点v10的最短路线也在这条路线上。
动态规划求解可分为三个步骤:分解、求解与合并。
动态规划要求子过程指标满足递推关系:

常用的指标函数有连和形式和连乘形式。连和形式为:

连乘形式为(vj≠0):


例6.1的指标函数属于连和形式。
最优指标函数fk(sk)是取式(6-3)或式(6-4)的最优值。式(6-3)的最优指标函数是:

式(6-4)的最优指标函数是:

式中Opt=optimization,表示“max”或“min”。式(6-3)~式(6-6)就是动态规划的基本方程。为了使递推方程有递推起点,需要确定最后一个状态sn的最优指标fn(sn)的值,称fn(sn)为终端条件。一般情况下,连和形式fn(sn)=0,连乘形式fn(sn)=1。但也有例外,如式(6-3)和式(6-4)中的Vn不等于0或1。在图6-2中,添加一个阶段5,终端条件是终点v10到v10的距离,即f5(s5)=0。
动态规划数学模型由式(6-5)或式(6-6)、边界条件及状态转移方程构成。如连和形式的数学模型为:
 (www.daowen.com)
(www.daowen.com)
由式(6-5)和式(6-6)的形式知,计算顺序是从最后一个阶段开始到第一阶段结束,这种方法称为逆序法。也可以将基本方程改为向前递推,如式(6-1)改为:

当计算顺序是从第一阶段开始到最后一个阶段结束,这种方法称为顺序法。
现在用逆序法列表求解例6.1。
k=n=5时,f5(v10)=0,k=4,递推方程为:

f5(s5)到f4(s4)的递推过程见表6-1。
表6-1
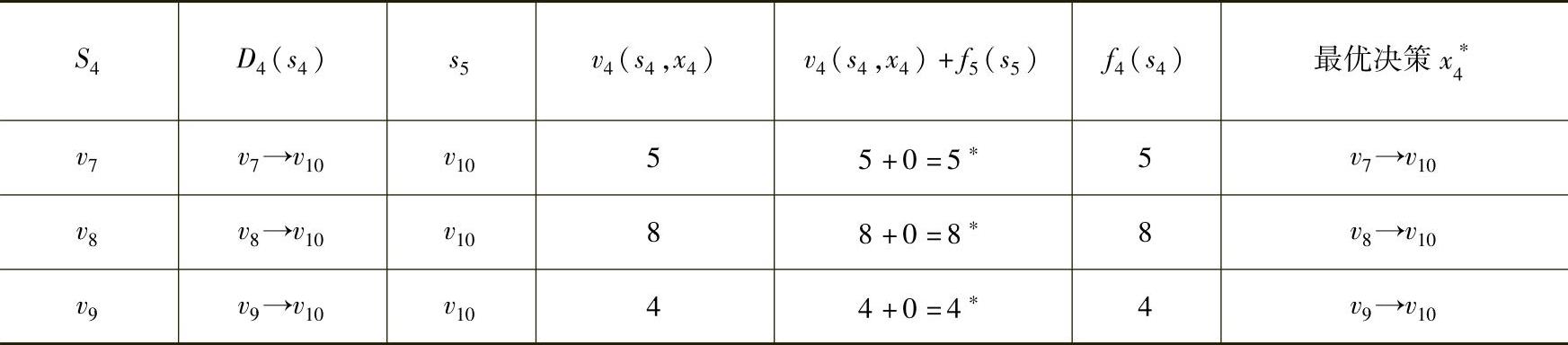
第4阶段各状态的决策唯一,最优值等于对应的距离。
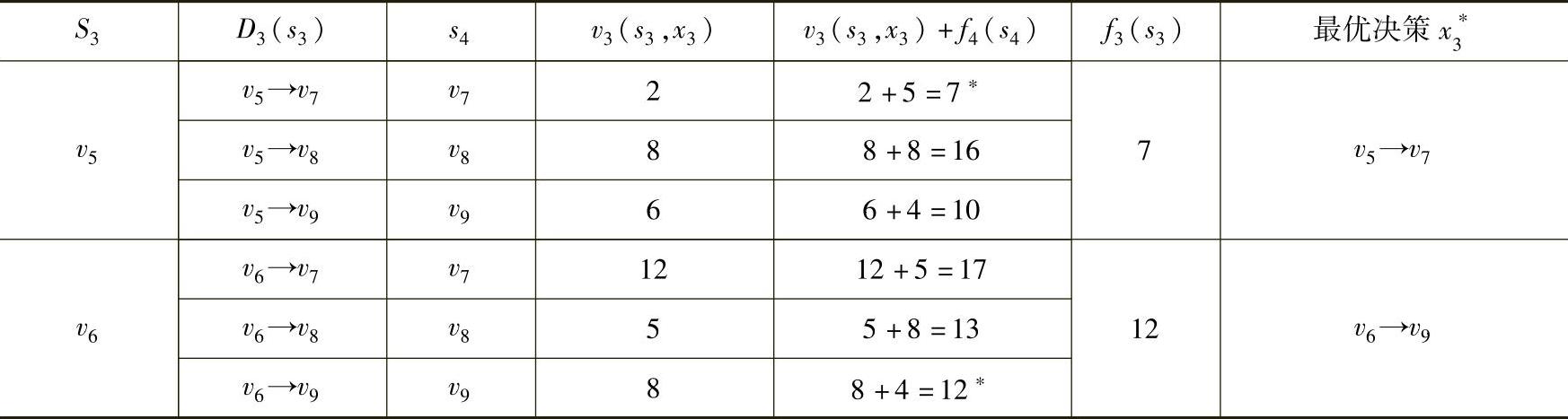
k=3,递推方程为:

f4(s4)到f3(s3)的递推过程见表6-2。
表6-2
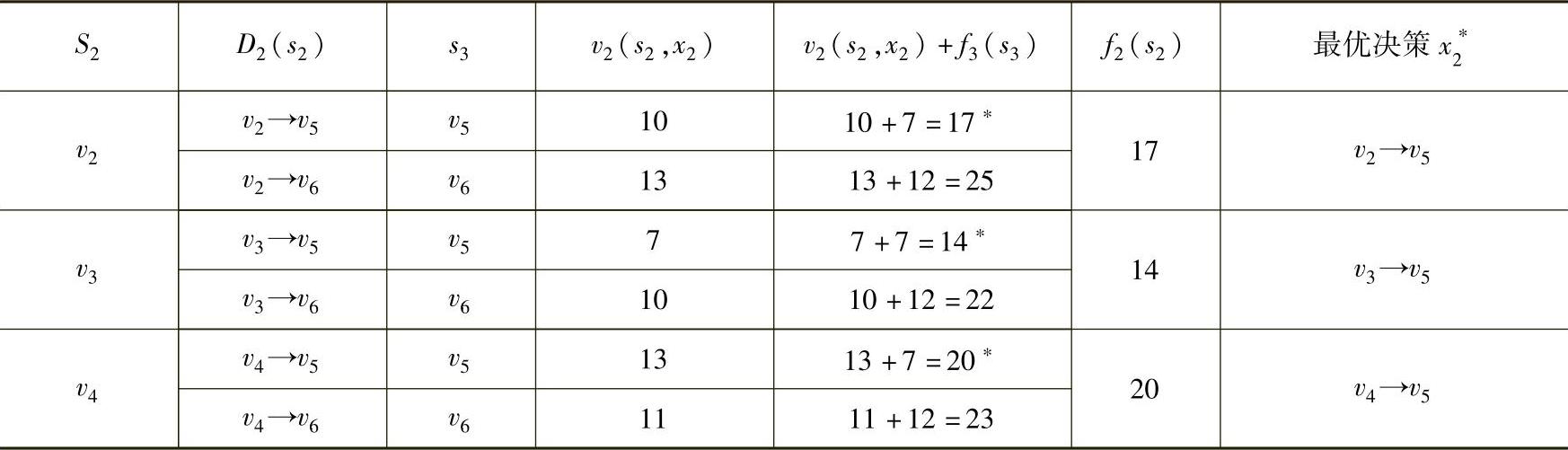
k=2,递推方程为:

f3(s3)到f2(s2)的递推过程见表6-3。
表6-3
k=1,递推方程为:

f2(s2)到f1(s1)的递推过程见表6-4。
表6-4

第1阶段计算结束,表明已得到最优策略,最优值是表6-4中f1(s1)的值,从v1到v10的最短路长为19。最短路线从表6-4到表6-1回溯,查看最后一列最优决策,得到最短路径v1→v2→v5→v7→v10。
直接在图上计算更为简单,如图6-3所示。
应当注意的是:动态规划是一种求解思路,注重决策过程,而不是一种算法。不同的问题得到的模型也不一样。学习动态规划就是要掌握它的这种原理和思路,分析问题的条件,
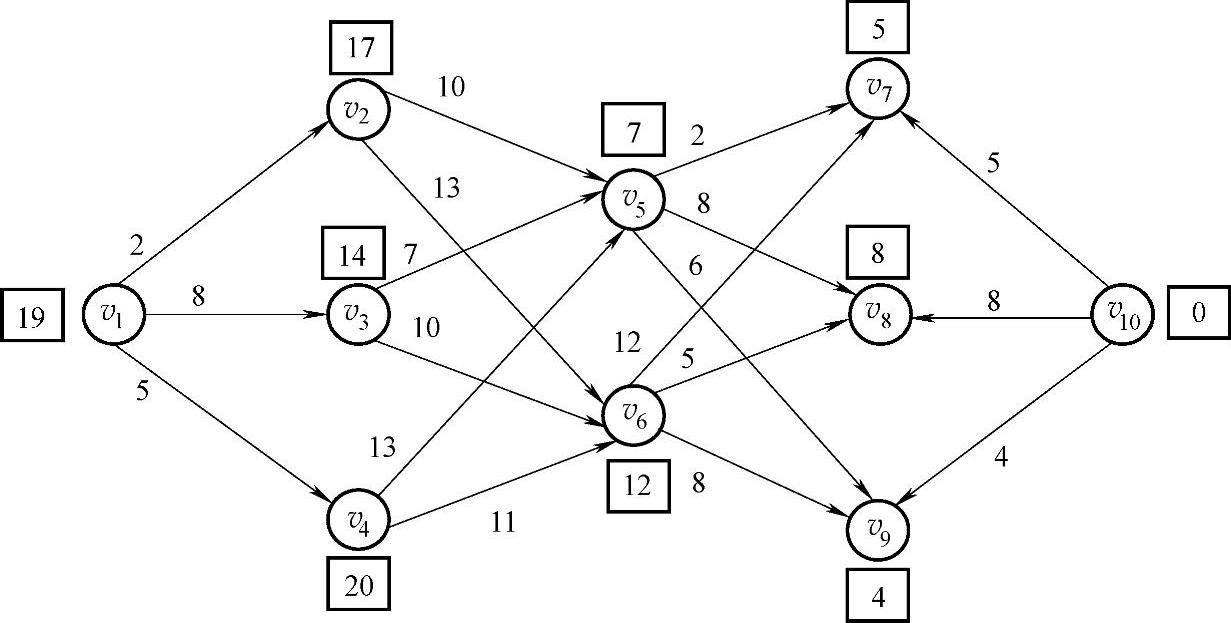
图6-3
确定模型的五个要素,利用递推关系求最优解。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






