【例6.1】 如图6-2所示,弧边上的数为两点间的距离,求点v1到v10的最短路线及最短路长,这是动态规划中一个较为直观的典型例子。
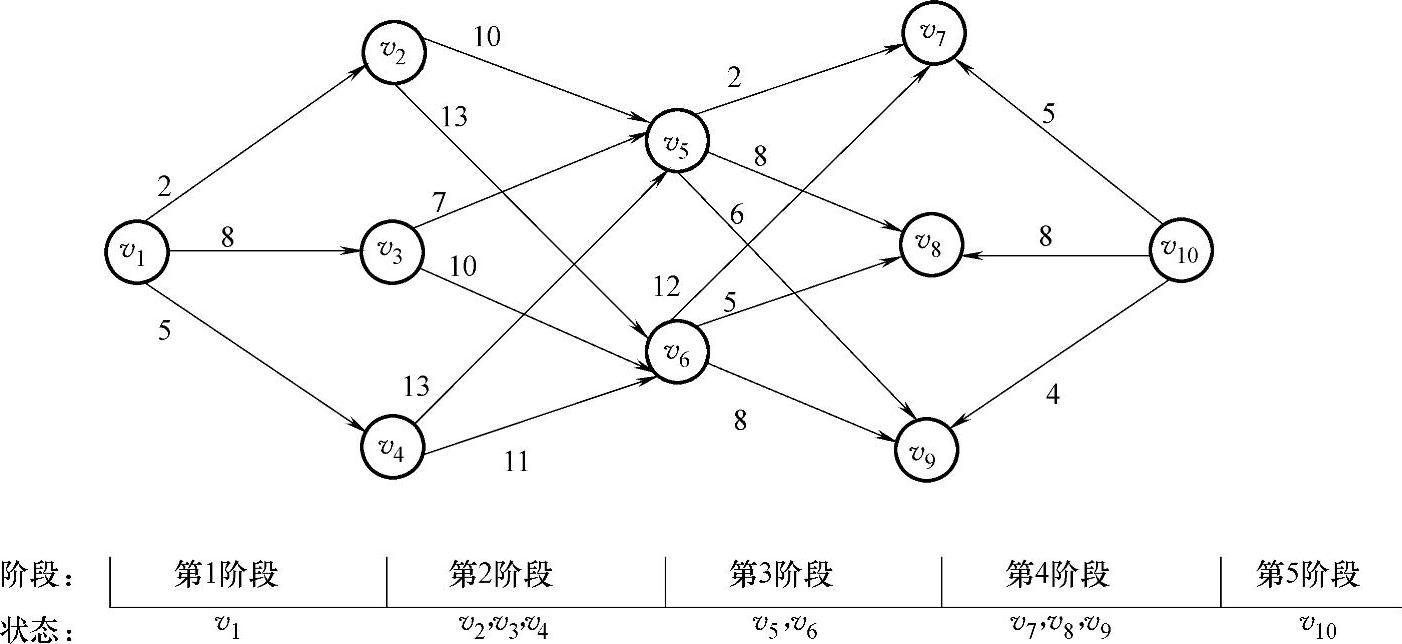
图6-2
通过该例题,我们来介绍有关动态规划的基本概念。
动态规划数学模型由阶段、状态、决策与策略、状态转移方程及指标函数5个要素组成。
(1)阶段(Stage) 表示决策顺序的时间序列,阶段可以按时间或空间划分,阶段数k可以是确定数、不定数或无限数。
图6-2中按空间划分为4个阶段,图中第5个阶段是虚拟的一个边界阶段。
(2)状态(State) 描述决策过程当前特征并且具有无后效性的量。状态可以是数量,也可以是字符,数量状态可以是连续的,也可以是离散的。每一状态可以取不同值,状态变量记为sk。各阶段所有状态组成的集合称为状态集。
如图6-2所示,各阶段的状态为上一阶段的结束点,或该阶段的起点组成的集合。第1阶段的状态为v1,第2阶段的状态为v2、v3、v4,第3阶段的状态为v5、v6,第4阶段的状态为v7、v8、v9,第5阶段的状态为v10,也是问题的结束。
状态的无后效性是指给定某一阶段状态后,决策过程由此阶段开始,以后的演变不受此阶段以前历史状态的影响。(https://www.daowen.com)
(3)决策(Decision) 从某一状态向下一状态过度时所做的选择。决策变量记为xk,xk是所在状态sk的函数。
在状态sk下,允许采取决策的全体称为决策允许集合,记为Dk(sk)。各阶段所有决策组成的集合称为决策集。
策略(Strategy)从第1阶段开始到最后阶段全过程的决策构成的序列称为策略,第k阶段到最后阶段的决策序列称为子策略。
图6-2中,策略就是点v1到v10的一条路线,共有18个策略(18条路线)。最优策略是点v1到v10的最短路线。子策略可以是其他点到v10的路线,显然策略也是子策略。
(4)状态转移方程(State transformation function) 某一状态以及该状态下的决策,与下一状态之间的函数关系,记为sk+1=T(sk,xk)。
某一阶段的状态与下一阶段的状态有某种对应关系,是状态的转移规律,与所处状态及选择的决策有关。图6-2中,k+1阶段的状态等于k阶段某个状态下的决策。
(5)指标函数或收益函数(Return function) 是衡量对决策过程进行控制的效果的数量指标,具体可以是收益、成本、距离等指标。分为k阶段指标函数、k子过程指标函数及最优指标函数。
从k阶段状态sk出发,选择决策xk所产生的第k阶段指标,称为k阶段指标函数,记为vk(sk,xk)。从k阶段状态sk出发,选择决策xk,xk+1,…,xn所产生的第k阶段指标,称为k子过程指标函数,记为vk(sk,xk,xk+1,…,xn)或Vk,n为阶段数。从k阶段状态sk出发,对所有的子策略,最优的过程指标函数称为最优指标函数,记为fk(sk),通常取Vk的最大值或最小值。
在图6-2中,vk(sk,xk)的含义是在状态sk下选择决策xk时的距离,如v2(v4,v5)=13。Vk的含义是在状态sk下选择某一条路线到v10(决策序列)的距离,如v2(v3,v6,v8,v10)=10+5+8=23。最优指标函数是某一点到v10的最短距离。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





