已知线性规划的标准型为:
maxZ=CX
(1)基式中A是m×n矩阵,m≤n且r(A)=m,显然A中至少有一个m×m阶子矩阵B,使得r(B)=m。B是矩阵A中m×m阶非奇异子矩阵 ,则称B是线性规划的一个基(或基矩阵)。当m=n时,基矩阵唯一,当m<n时,基矩阵就可能有多个,但最多不超过
,则称B是线性规划的一个基(或基矩阵)。当m=n时,基矩阵唯一,当m<n时,基矩阵就可能有多个,但最多不超过 。
。
【例1.7】 已知线性规划
maxZ=4x1-2x2-x3

求其所有基矩阵。
解 约束方程的系数矩阵 为2×5矩阵,r(A)=2,则其子矩阵为
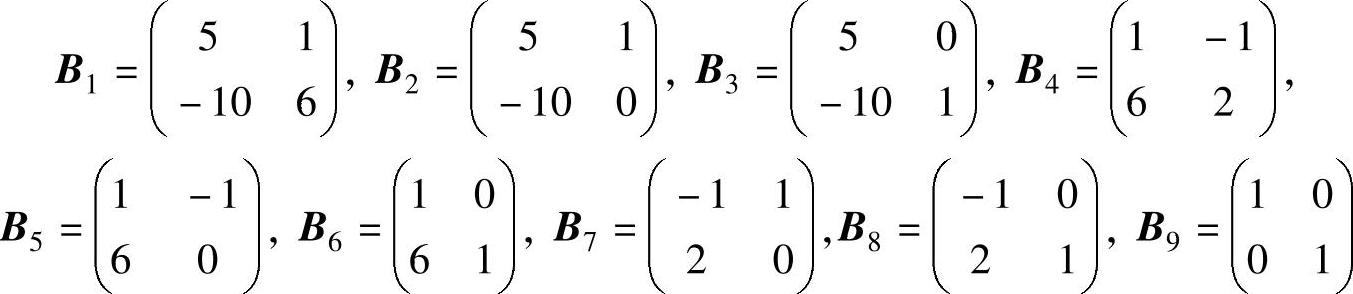
为2×5矩阵,r(A)=2,则其子矩阵为 个,其中第1列和第3列构成的2阶矩阵不是一个基,基矩阵为以下9个:
个,其中第1列和第3列构成的2阶矩阵不是一个基,基矩阵为以下9个:
(2)基向量、非基向量、基变量、非基变量 当确定某一子矩阵为基矩阵时,则基矩阵对应的列向量称为基向量,其余列向量称为非基向量,基向量对应的变量称为基变量,非基向量对应的变量称为非基变量。
基变量和非基变量是针对某一确定基而言的,不同的基对应的基变量和非基变量不同。例1.7中B1的基向量是A中的第1列和第2列,其余列向量是非基向量,x1、x2是基变量,x3、x4、x5是非基变量;B2的基向量是A中的第1列和第4列,其余列向量是非基向量,x1、x4是基变量,x2、x3、x5是非基变量。(https://www.daowen.com)
(3)基本解 对某一确定基B,令非基变量等于零,利用约束条件AX=b解出基变量,则这组解称为基B的基本解。例1.7中对于B9而言,X=(0,0,0,3,2)是其基本解。
(4)可行解 满足约束条件的解X=(x1,x2,…,xn)T称为可行解。
(5)最优解 满足目标函数的可行解称为最优解,即使得目标函数达到极值的可行解就是最优解。
(6)基本可行解 满足非负条件的基本解称为基本可行解(也称基可行解)。在例1.7中,X=(0,0,0,3,2)既是基本解,又满足条件xj≥0,则其是一个基本可行解。
(7)基本最优解 最优解是基本解称为基本最优解。例1.7中 是最优解,同时又是B3的基本解,因此它是基本最优解。
是最优解,同时又是B3的基本解,因此它是基本最优解。
当最优解唯一时,最优解也是基本最优解。当最优解不唯一时,则最优解不一定是基本最优解。
(8)可行基与最优基 基可行解对应的基称为可行基,基本最优解对应的基称为最优基。最优基也是可行基。
基本解、可行解、最优解、基本可行解、基本最优解的关系如图1-6所示。箭尾的解一定是箭头的解,否则不一定成立。
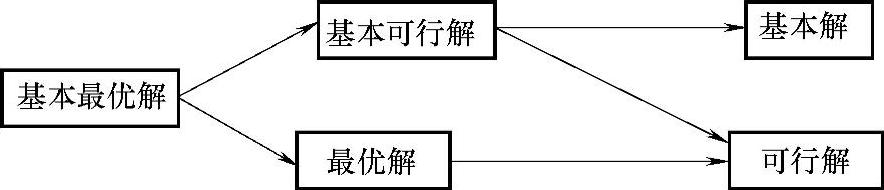
图1-6
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





