智能植物工厂是将现代生物工程技术、农业工程技术、环境工程技术、信息技术和自动化技术应用于农业生产领域,通过设施内高精度环境控制实现农作物周年连续生产的高效农业系统。植物工厂是国际上公认的设施农业高级发展阶段,是一种技术高度密集、不受或很少受自然条件制约的现代农业可持续生产系统。在这个生产系统中,使用保温不透光材料作为围护结构,采用立体栽培技术,利用荧光灯、LED等人工光源为植物提供光照,并配备有循环风机、空调、CO2施肥系统、营养液循环系统等设备,植物生长发育直接相关的部分或全部生产要素(环境因子和水肥供给等)全程可自动化调控,并具有一定植物生产流程的空间自动管理功能,实现植物规模化高效生产,植物产量可达到传统农业产量的几十倍甚至上百倍。智能植物工厂采用物理农业技术代替化学农药杀虫灭菌,使植物品质达到绿色甚至有机品质;采用资源循环利用技术,既提高了多种资源利用率,又实现了零排放零污染。由于智能植物工厂不占用农用耕地,产品安全无污染,操作省力,机械化程度高,单位面积产量可达露地的几十倍甚至上百倍,因此被认为是21世纪解决人口、资源、环境问题的重要途径。
广义的植物工厂包含了传统的设施农业,它最早起源于欧洲,1957年世界上第一家植物工厂诞生在丹麦。1964年奥地利开始试验一种塔式植物工厂,后推广到俄罗斯、北欧地区及部分中东国家采用。1971年丹麦也建成了叶菜工厂,用于快速生产独行菜、鸭儿芹、莴苣等。日本在植物工厂(尤其是人工光植物工厂)在推进技术发展中起到重要作用,1974年日本建成一座电子计算机调控的花卉蔬菜工厂,此后相关的环境控制生物学、环境控制技术、生产设施与执行机构等技术与装备得以快速全面发展。20世纪80年代至2000年,日本在植物工厂中生产蔬菜、小麦、水稻、植物组培苗等培育领域获得成功,引领推进了产业的发展方向。同时,荷兰在太阳光植物工厂及LED补光领域发展较快,技术传播到世界各国。我国从2000年通过引进、消化、吸收世界先进的工厂化设施及其栽培技术开始研发植物工厂技术。
从传统设施农业向智能植物工厂的发展是以生产要素管控自动化水平来判定的。生产要素包括温度、湿度、CO2浓度、气流、光照等环境要素以及植物产品从育苗到采收的各项管理要素。种植业4.0时代的智能植物工厂应用大数据、人工智能、物联网以及机器人等先进技术,实现了生产要素的完全控制,通过环境要素、水肥要素的自动智能化调控以及植物产品从育苗到采收、分级等环节完全自动化管控,达到高产、优质和无人化的目标,是植物工厂发展的最高级阶段。
目前,智能植物工厂的发展需要在以下几个方面进行突破。
1.研究植物生长模型和环境模型
大数据是当前国际上的热点研究方向,通过大数据获取技术以及数据挖掘处理技术,研究智能植物工厂数字化作物高效生长管理模型,建立作物生理信息与环境、营养物之间的定量规律,为温室精准化管理提供依据。通过不间断实时连续获取植物工厂环境参数以及调控设备的工作状态,采用人工神经网络深度学习算法等人工智能技术,研究具有在线自动优化能力的植物工厂环境参数模型,为智能植物工厂环境智能控制提供技术支持。
2.研究植物生产调控策略
随着深度学习算法等人工神经网络学习技术的发展,人工智能正逐渐被引入工业、农业等领域。将人工智能技术引入智能植物工厂,能大大提高环境管理调控水平。采用人工神经网络、遗传算法、支持向量机、模糊控制等人工智能技术,根据植物工厂环境模型和作物生长模型建立以植物工厂效益最大化为目标的智能化环境及水肥控制策略是未来智能植物工厂的研究重点。(www.daowen.com)
3.基于物联网技术,建立智能植物工厂管理控制系统
开发基于Web的温室数据采集与控制系统软硬件,通过环境、生物、营养物等生物物理传感器以及无线传感器网络,将智能植物工厂中的环境采集设备和环境调控设备以无线方式联网,建立网络化环境调控系统,实现植物工厂可靠、实时、精准的集约化控制。
4.研发智能植物工厂机器人
农业机器人是未来工厂化农业的主要技术装备,通过机器人自主导航技术、目标自动识别技术以及机器人精准作业技术的发展,机器人在智能植物工厂的育种、种植管理、采收以及果实分级等方面大有用武之地。针对设施内复杂的工作环境,采用GNSS导航、视觉导航、激光导航、惯性导航、测距导航、电磁导航等多种导航技术融合的综合导航技术,实现机器人的高精度自主导航,满足机器人作业所需的高精度定位和路径规划要求。采用机器视觉技术、超声波技术和光谱分析技术相结合的方式,实现机器人的目标识别及定位。采用柔性设计的机械臂和末端执行器,实现育种、种植、采摘、果实分级等工作的自动化。
当前的植物工厂技术还达不到智能植物工厂(见图5-16)的水平,且存在成本高、能耗大、盈利能力差的问题。随着自动化、智能化等高新技术的研发与应用,产业规模化、标准化发展,植物工厂终将走向智能化、无人化、低成本、高产量、高品质、高效益的健康之路。随着世界人口数量的不断增长和生活区域的集中,智能植物工厂必将得到大面积应用,成为未来解决农业土地空间不足、资源短缺的有效途径。
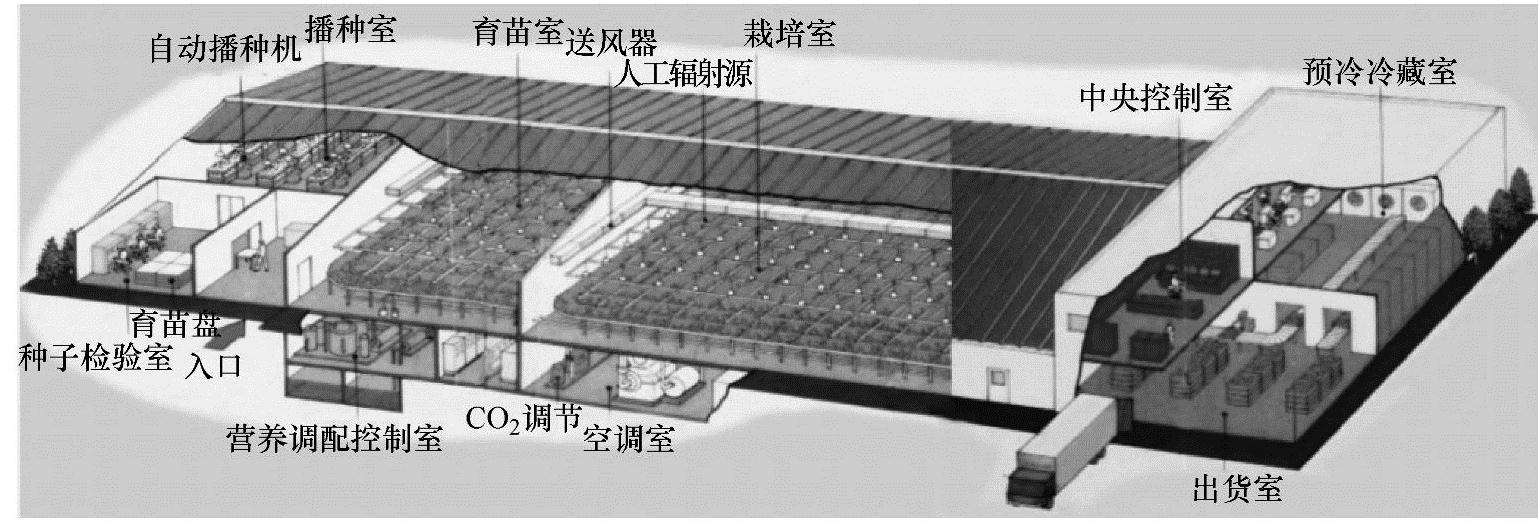
图5-16 智能植物工厂结构示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







